

Positioning method and system
A positioning method and displacement technology, applied in the fields of image processing and computer vision, can solve problems such as complex calculation methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
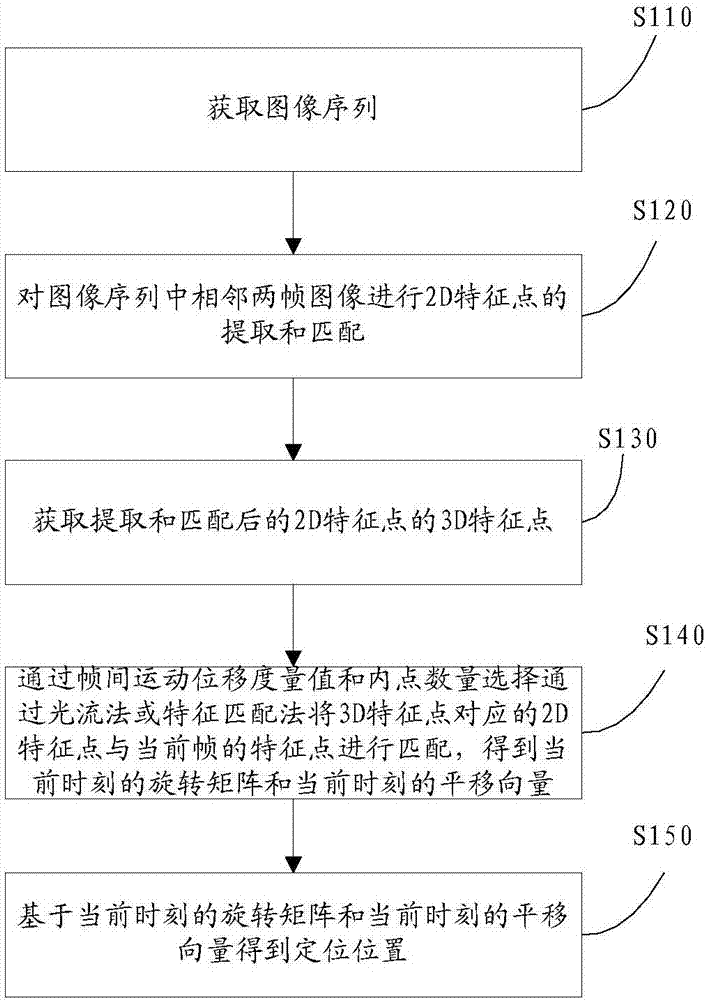
[0053] The embodiments of the present invention achieve fast and high-precision technical effects by providing a positioning method and system.
[0054] The technical solution in the embodiment of the present invention is to solve the above-mentioned problems, and the general idea is as follows:
[0055] The calculation speed of the optical flow method is faster than that of the feature method, and the positioning frequency is high. It has a high progress in the small range of viewing angle rotation between frames, but the cumulative error will continue to increase with the increase of the total amount of movement, and it is easy to be affected by the light. interference. The feature matching method has better robustness to large-scale field of view changes, and its accuracy is higher than that of the optical flow method. The feature point matching method has a higher progress, but the speed is slower and the positioning frequency is lower. In the embodiment of the present in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More