

Rolling wheel type variable-diameter branch human-assisted blueberry picking device
A technology of artificial assistance and picker, which is applied in the direction of picking machines, agricultural machinery and implements, etc. It can solve the problems of skin damage, low picking efficiency, surface oxidation, etc., and achieve fast picking speed, convenient operation, and small size. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
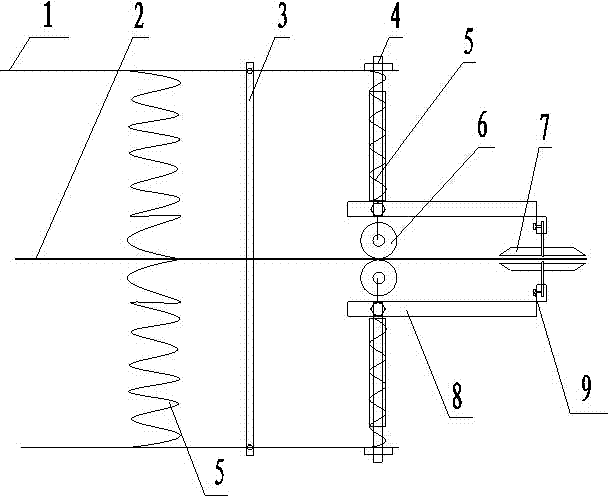
[0013] A roller type variable diameter branch artificially assisted blueberry picker, comprising a handle 1, a support rod 3, a spring 5, a picker and a collection bag, a spring, a support rod 3 and a picker are fixedly installed on the handle 1, and the support rod 3 is installed on the On the handle 1 and hinged with the handle 1, the picker is composed of a roller 6, a telescopic rod 4, a spring 5, a rotary cutter 7 and a collection bag, the spring 5 is a compression spring, one end of the telescopic rod 4 is connected with the roller 6, and the other end Through the spring 5 and the through hole provided on the handle 1 and connected with the handle 1, one end of the connecting rod 8 is fixed on the telescopic rod 4 through the bolt 9, and the other end of the connecting rod 8 is connected with the rotary cutter 7 through the bolt 9, and the rotary cutting The blade of the knife 7 is in the shape of a trapezoid, and the long bottom edge of the trapezoid is close to the surf...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More