

Visual localization system of industrial robots and method
An industrial robot and visual positioning technology, applied in the direction of manipulators, manufacturing tools, program control manipulators, etc., can solve the problems of difficult data transmission, difficult location finding, and inability to realize collective cooperation, interaction and path planning of group robots, etc., to achieve application The effect of convenience and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] In order to describe the technical content of the present invention more clearly, further description will be given below in conjunction with specific embodiments.
[0059] Robot localization is the process of determining the spatial position of a mobile robot in its environment. The real-time positioning of the robot refers to the ability of the positioning method adopted by the robot and its software and hardware equipment to determine the spatial position of the mobile robot in the environment in a timely and correct manner. Meeting the requirements of real-time positioning is the prerequisite for the robot control system to control the movement of the robot in a correct and timely manner. One of the prerequisites.
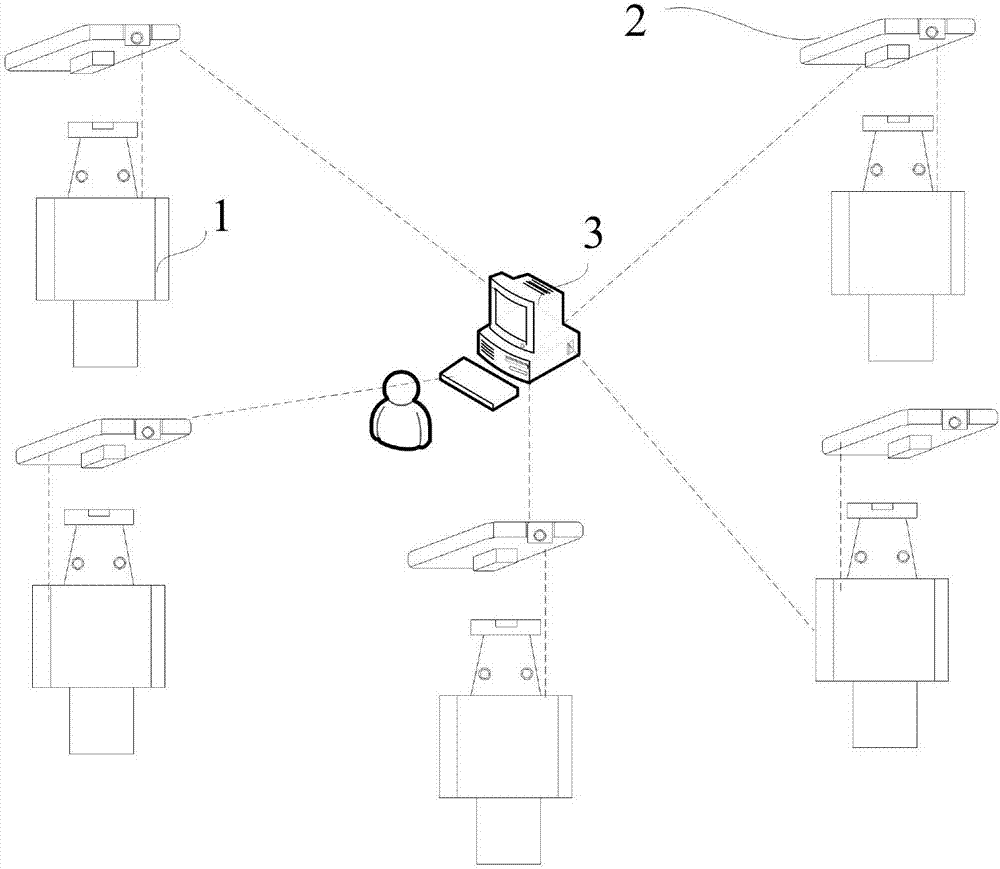
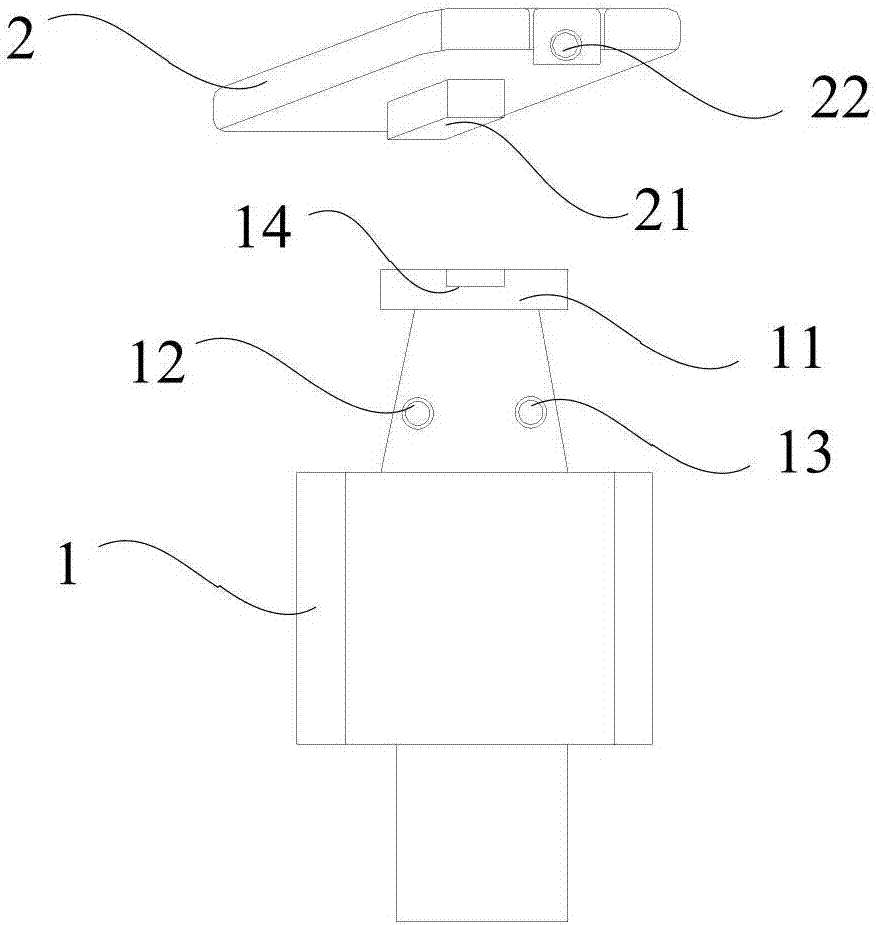
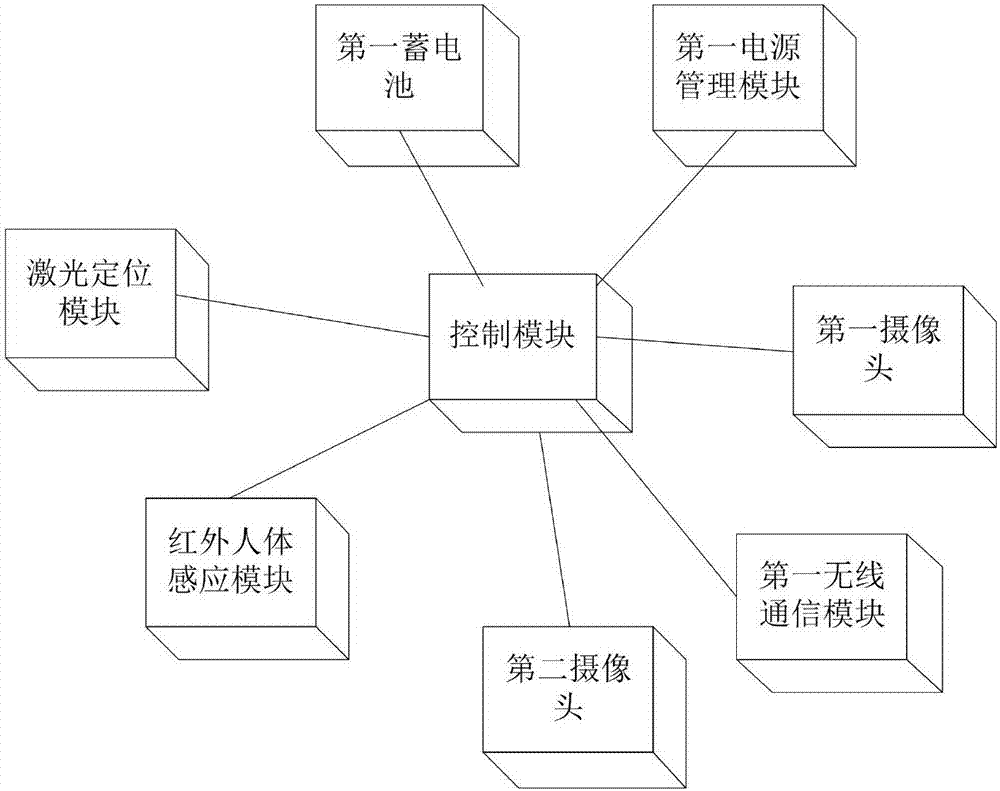
[0060] Such as Figure 1~3 As shown, the present invention provides a visual positioning system and method for an industrial robot 1, the system comprising:
[0061] A plurality of industrial robots 1, the top of each of the industrial robots 1 is equi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More