

Deep and reinforcement learning-based real-time online path planning method of
A technology of reinforcement learning and path planning, applied in two-dimensional position/channel control and other directions, it can solve problems such as poor generalization ability, explosion of state-space combinations, and optimization of action decision-making, achieving wide applicability, reasonable method design, The effect of solving the path planning problem
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0048] Embodiments of the present invention are described in detail below, and the embodiments are exemplary and intended to explain the present invention, but should not be construed as limiting the present invention.
[0049] The deep reinforcement learning path planning method in this embodiment includes the following steps:
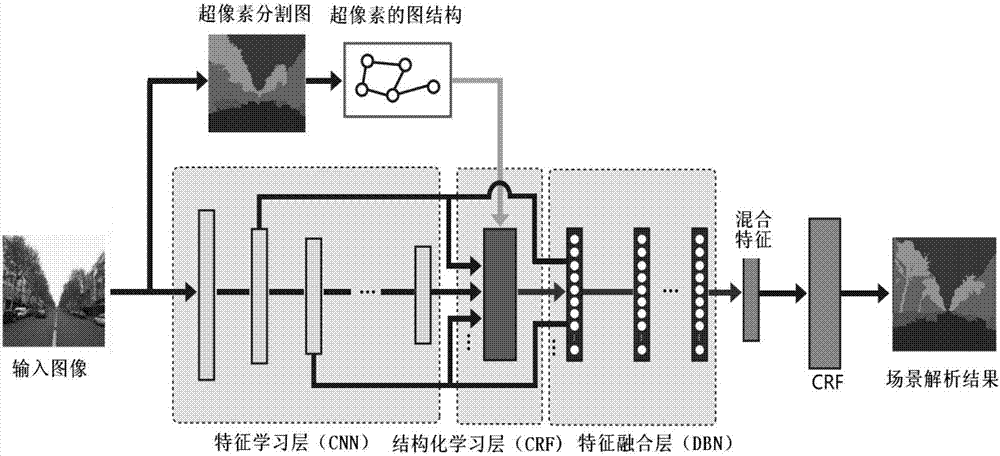
[0050] Step 1: The camera image is collected, and then the image is input into the scene analysis network to obtain the corresponding analysis result map. The scene parsing network includes a convolutional neural network feature learning layer (Feature Learning Layers), a conditional random field structured learning layer (Structural Learning Layer), and a feature fusion layer based on a deep belief network (Feature Fusion Layers).
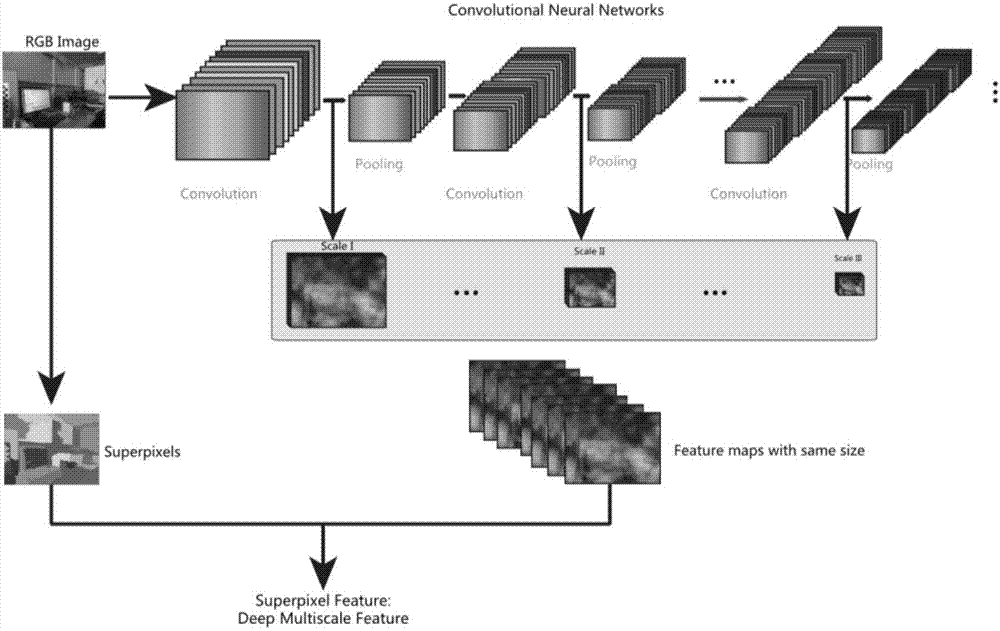
[0051] Step 1.1: Feature Learning Layers: The convolutional neural network performs feature learning on the images collected by the camera, and generates high-level information features corresponding to each pixel of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More