

Heavy haul locomotive anti-skid control method based on asymmetric barrier liapunov function
A technology of heavy-duty locomotives and control methods, which is applied to locomotives and other fields, and can solve problems such as difficulty in effectively utilizing the traction power of heavy-duty locomotives
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
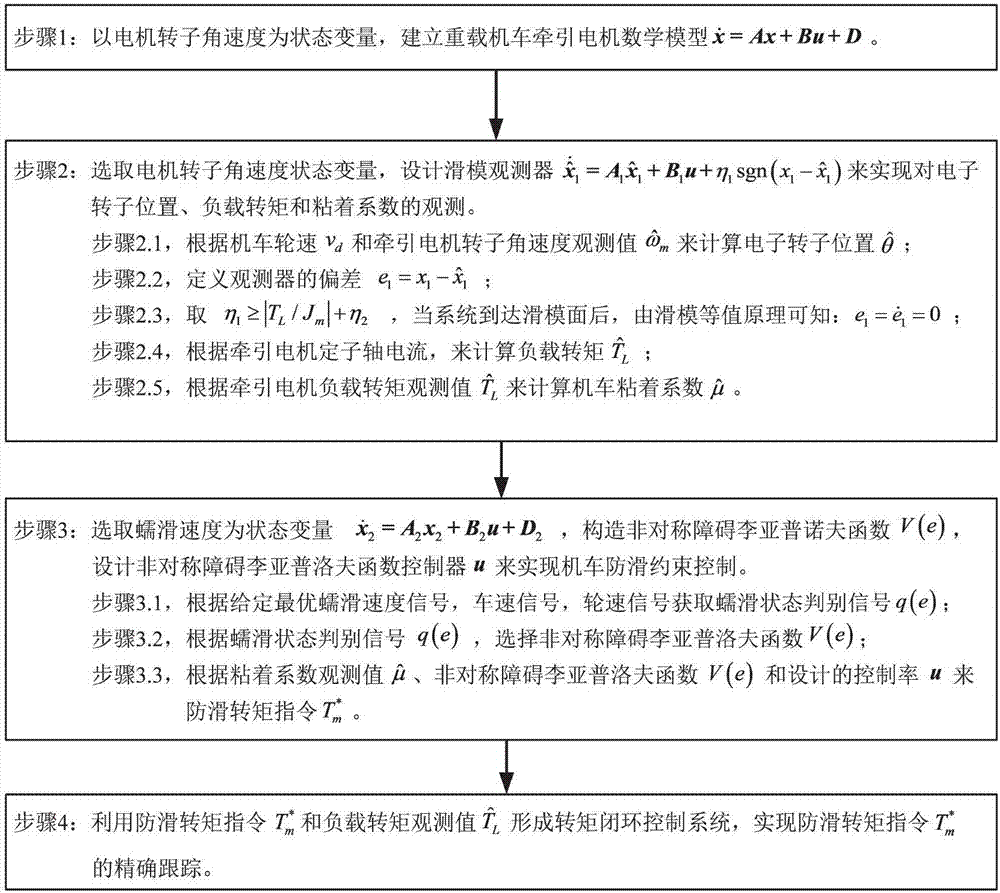
[0038] figure 1 It is a schematic flowchart of a heavy-duty locomotive anti-skid control method based on an asymmetric obstacle Lyapunov function according to Embodiment 1 of the present invention. Such as figure 1 As shown, the flowchart includes the following steps, including:
[0039] Step 1. Taking the motor rotor angular velocity as the state variable, establish a mathematical model of the heavy-duty locomotive traction motor
[0040]
[0041] In the formula, x=[ω m v s ] T , u=T m , A=[0 0] T , T m is the output torque of the traction motor, T L is the load torque of the traction motor, J m is the moment of inertia of the traction motor, R g is the transmission ratio of the gearbox, r is the radius of the wheel set, v t is the body speed;
[0042] Step 2, select the state variable x 1 , designing a sliding mode observer to achieve electronic rotor position load torque and coefficient of adhesion observation
[0043] In the formula, A 1 = 0,...
Embodiment 2
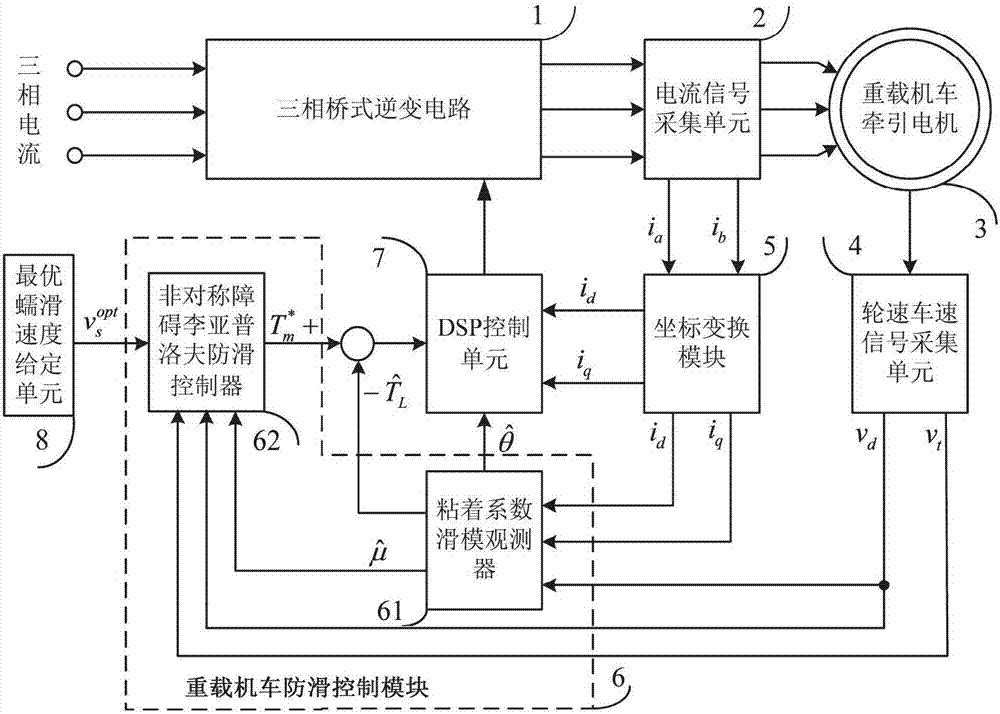
[0058] figure 2 It is a schematic diagram of the overall structure according to Embodiment 1 of the present invention, as figure 1 As shown, this embodiment provides a heavy-duty locomotive anti-skid control method based on asymmetric obstacle Lyapunov function, the method includes: a three-phase bridge inverter circuit 1, a current signal acquisition unit 2, a heavy-duty locomotive traction motor 3. Vehicle speed and wheel speed signal acquisition unit 4, coordinate transformation module 5, heavy-duty locomotive anti-skid control module 6, DSP control unit 7, optimal creep speed setting unit 8; the input terminal of the three-phase bridge inverter circuit 1 is connected to The output ends are respectively connected to the DSP control unit 7 and the current signal acquisition unit 2, the output end of the current signal acquisition unit 2 is connected to the heavy-duty locomotive traction motor 3 and the coordinate transformation module 5, the input end and the output end of ...
Embodiment 3
[0061] This embodiment is a supplementary description based on the first embodiment.
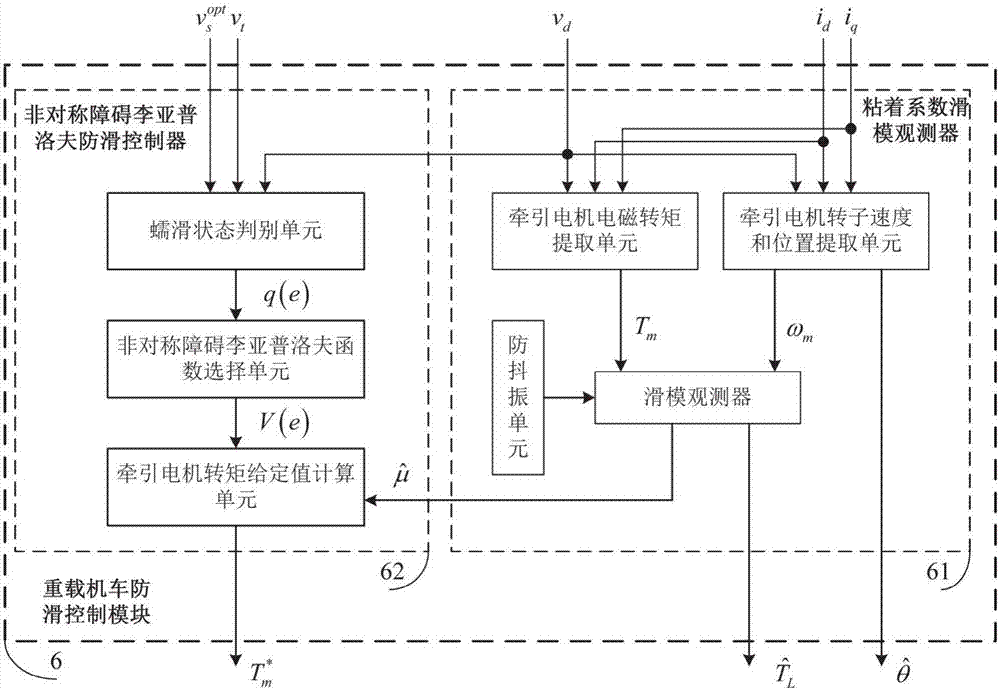
[0062] image 3 It is a schematic diagram of the principle of the heavy-duty locomotive anti-skid control module according to Embodiment 2 of the present invention. The heavy-duty locomotive anti-skid control module 6 includes: an adhesion coefficient sliding mode observer 61, an asymmetric obstacle Lyapunlov anti-skid controller 62; The output end of the sliding mode observer 61 is connected with the input end of the asymmetric obstacle Lyapunov anti-slip controller 62 .
[0063] Described sticking coefficient sliding mode observer 61 comprises traction motor electromagnetic torque extraction unit, traction motor rotor speed and position extraction unit, sliding mode observer, anti-chattering unit; The output terminal of traction motor electromagnetic torque extraction unit is connected with The input end of the sliding mode observer is connected, the output end of the traction motor angul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More