

Road surface self-adaption anti-skid controlling system and method for distributed type driving electric automobile
A technology for electric vehicles and control systems, applied in electric vehicles, control drives, control devices, etc., can solve the problems of high-frequency jitter of control torque, difficult debugging, difficult fuzzy control rules, etc., and achieve effective anti-skid effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
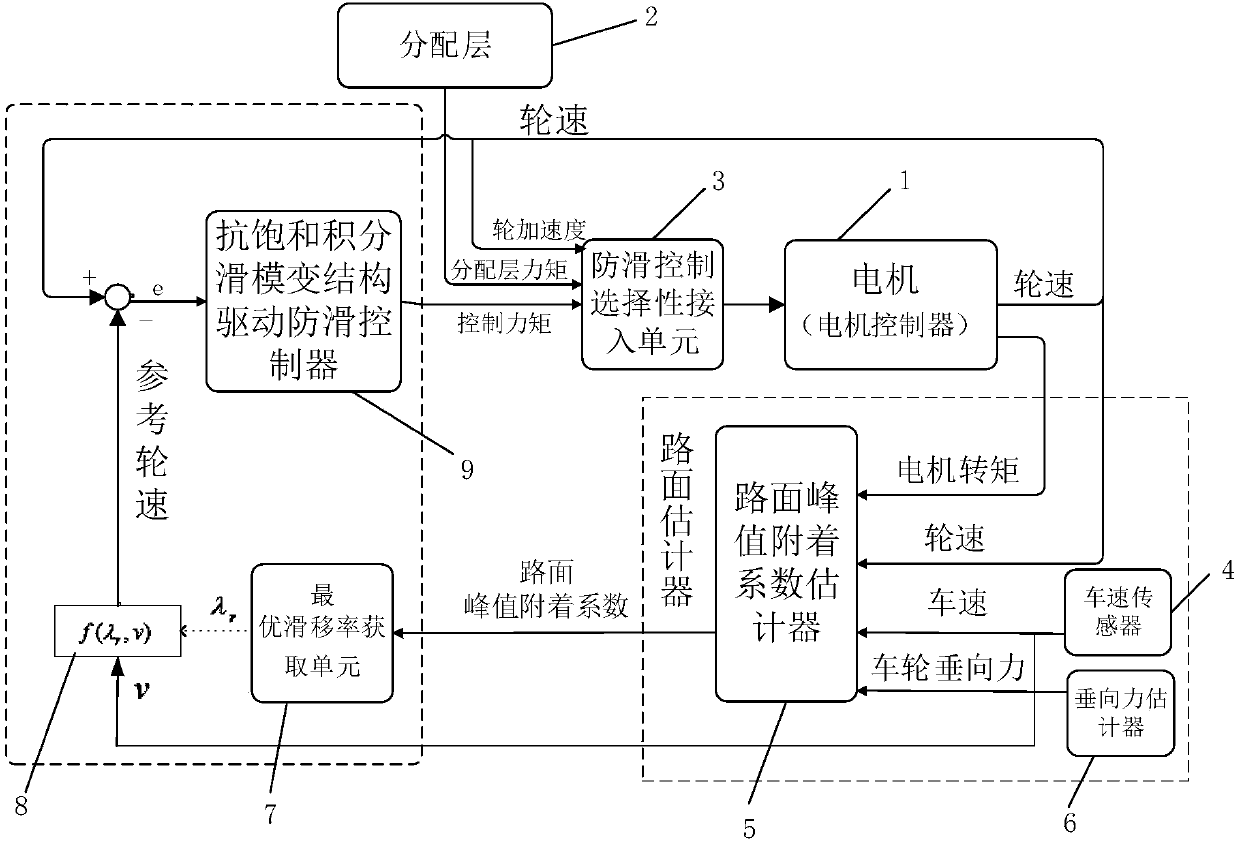
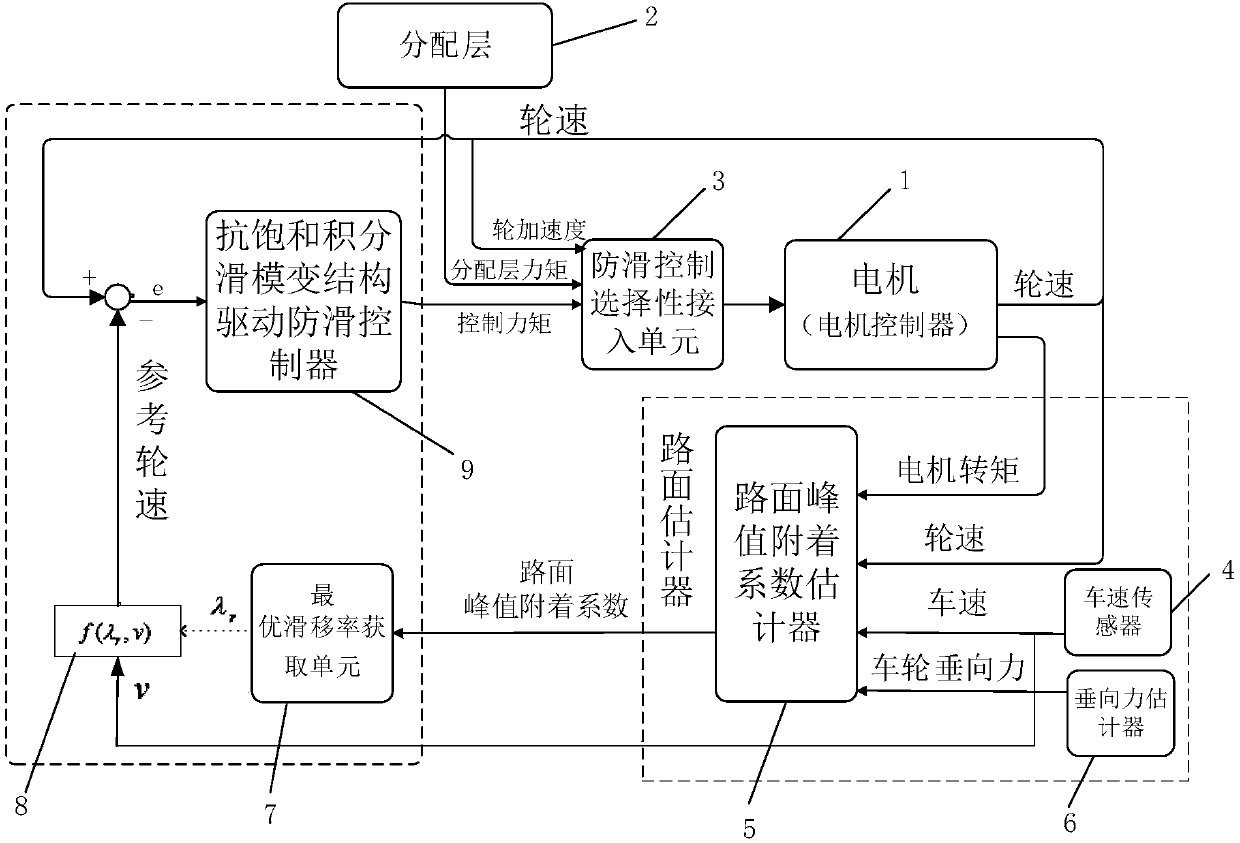
[0053] Such as figure 1 As shown, a road surface adaptive anti-skid control system for distributed drive electric vehicles, the system includes a motor controller 1 and a motor torque distributor 2, the motor controller 1 is provided with 4 drive motors respectively connected to the corresponding 4 wheels, the system It also includes a measured sensor unit, a nonlinear road estimation unit, an anti-skid control selective access unit 3 and a driving anti-skid control unit. The measured sensor unit is connected to the nonlinear road estimation unit and the driving anti-skid control unit, and the nonlinear road estimation unit is used to obtain each The road surface peak adhesion coefficient of each wheel, the nonlinear road surface estimation unit is connected to the driving anti-skid control unit, the driving anti-skid control unit is used to obtain the control torque of the four driving motors, and the anti-skid control selective access unit 3 is arranged between the driving an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More