

A head-mounted human body input apparatus spatial position and attitude measuring method
A technology of input devices and spatial positions, applied in the field of sensors, can solve problems such as cursor drift, affecting user experience, and difficult to completely remove offsets
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
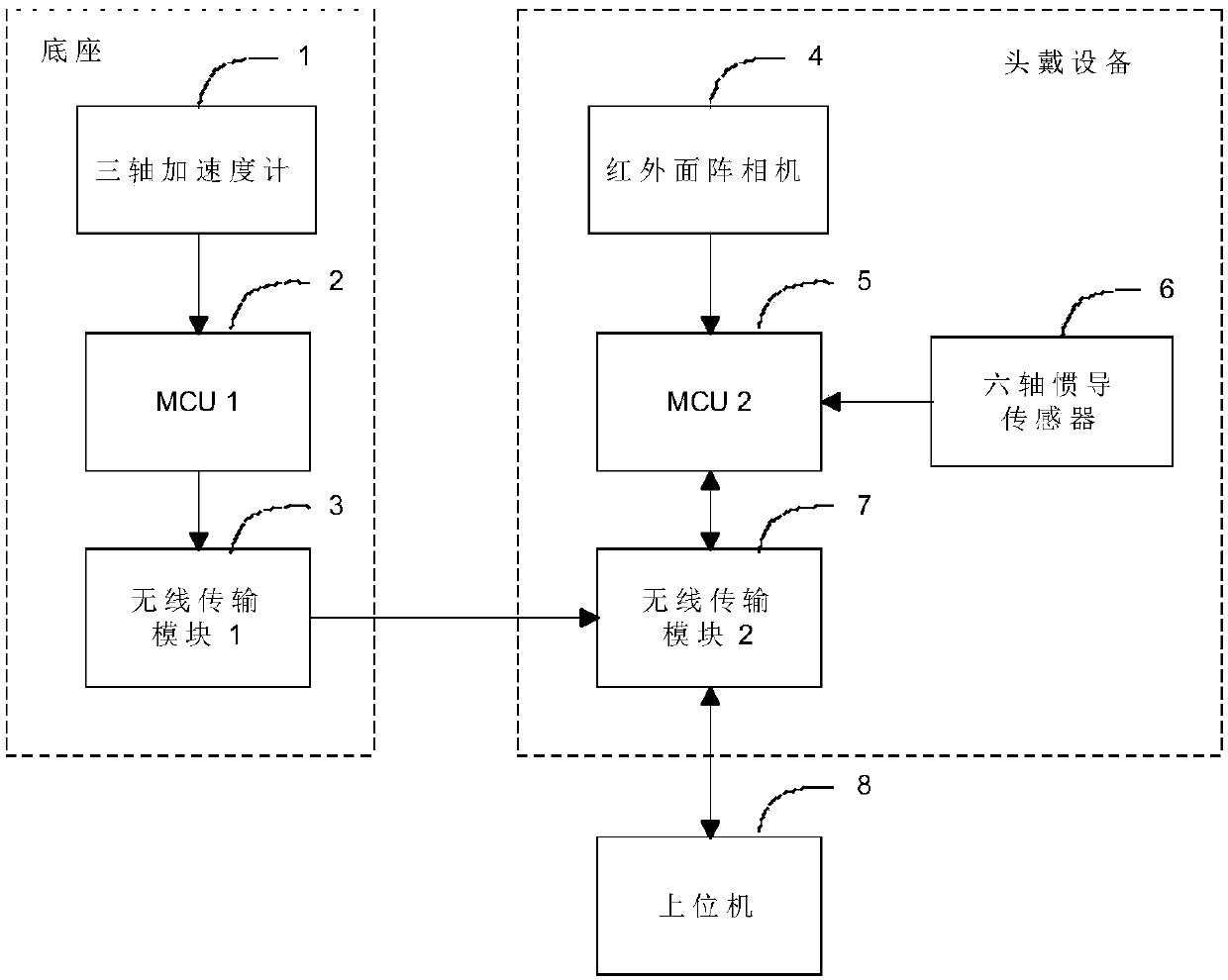
[0079] see figure 1 , 2 And 3, the present invention is realized by adopting the following technical solutions, a head-mounted human body input device space position and attitude measurement device, comprising:
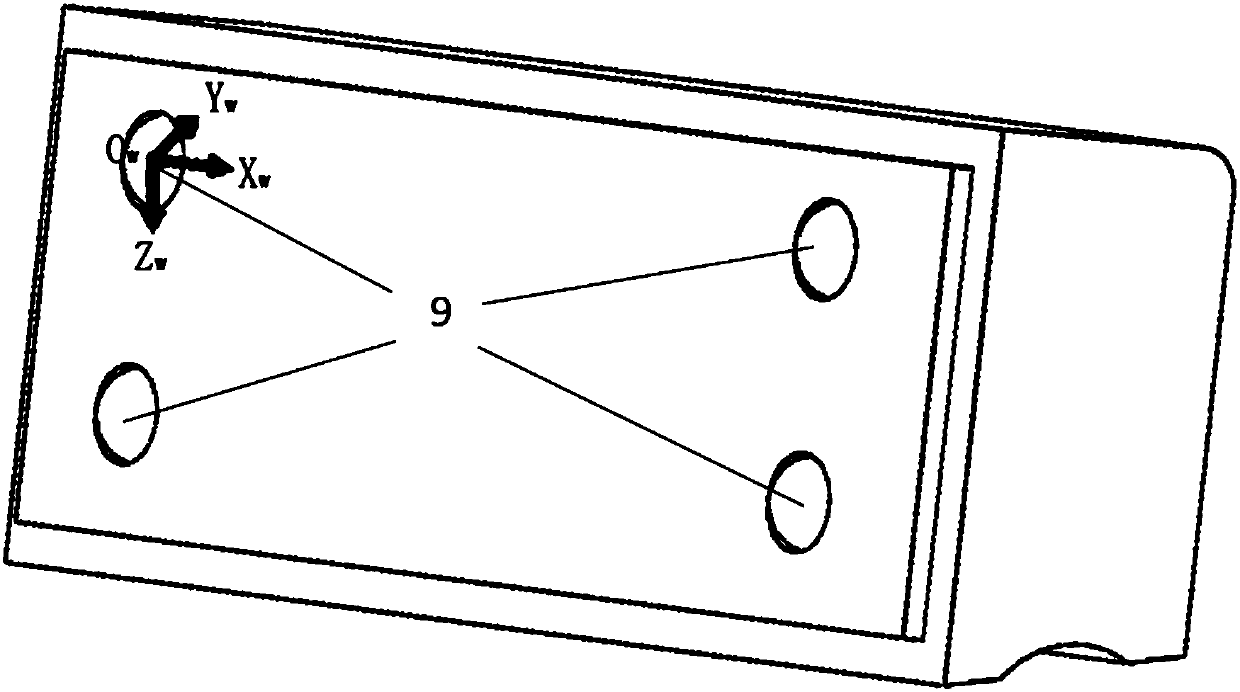
[0080] Infrared light emitting devices include:
[0081] Three-axis accelerometer (1), MCU 1 (2), wireless transmission module 1 (3), infrared light diode (9);
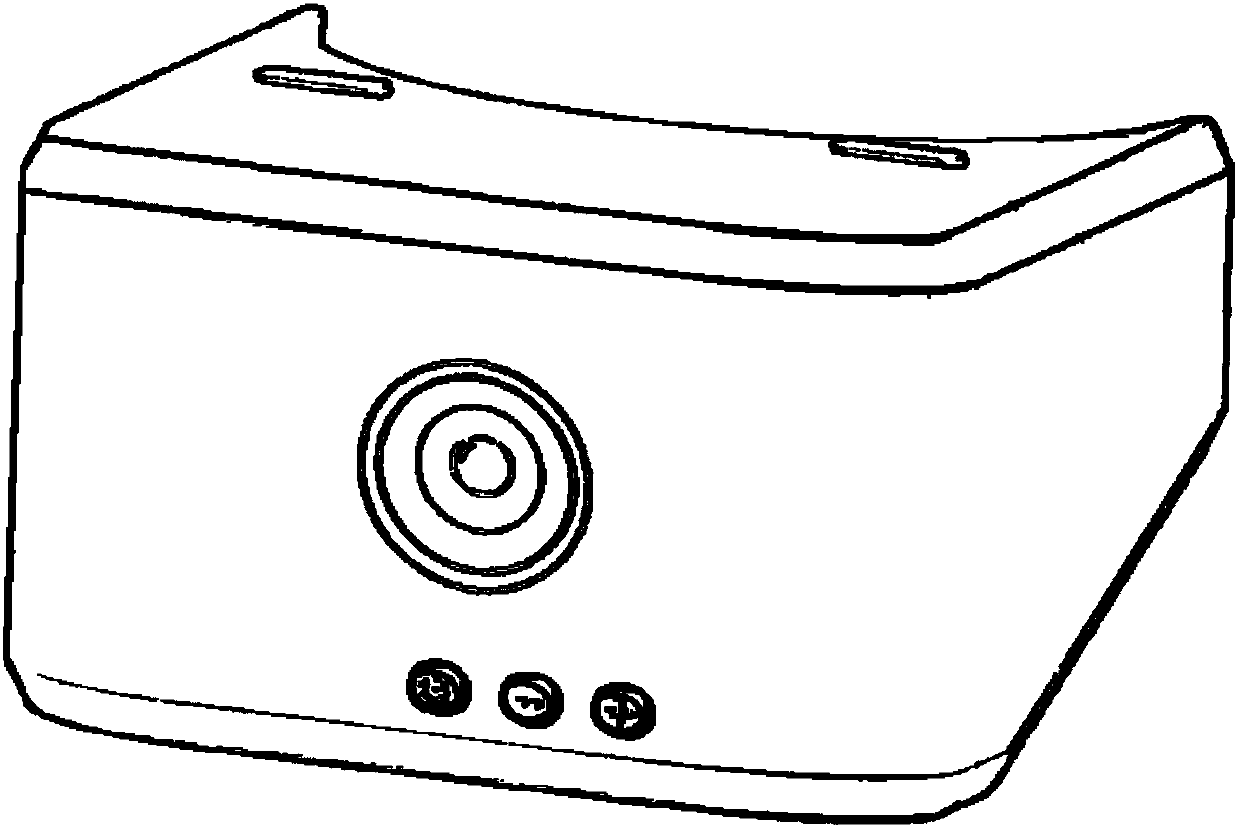
[0082] Headsets include:
[0083] Infrared area scan camera (4), MCU 2 (5), six-axis inertial navigation sensor (6), wireless transmission module 2 (7), upper computer (8).
[0084] in,
[0085] The three-axis accelerometer (1) is installed inside the infrared light emitting base, and is used to detect the pose relationship between the base and the world coordinate system;
[0086] The MCU 1 (2) is used to calculate the pose matrix of the infrared light emitting base and the world coordinate system according to the data measured by the triaxial accelerometer (1);
[0087] The wireless transmission modul...
Embodiment 2
[0099] Step 1, positioning the four infrared light spots emitted by the infrared light emitting device through the infrared area array camera installed on the head-mounted human body input device; the infrared light emitting device includes four infrared light source arrays;
[0100] Step 11, in the image coordinate system, edge detection is performed on the pixel point (u, v) in the image collected by the infrared area array camera, and the gray value G( u,v):
[0101]
[0102]
[0103]
[0104] Among them, f(u, v) is the gray value corresponding to the pixel point (u, v) in the image before edge detection;
[0105] The image coordinate system takes the upper left corner of the figure as the origin, the horizontal direction is the u axis, and the vertical direction is the v axis;
[0106] Step 12, setting the threshold T, if G(u, v) > T, then the pixel point (u, v) is the edge point of the infrared bright spot;
[0107] In this embodiment, the Otsu method is used t...
Embodiment 3
[0151] Since the infrared light emitting device may not be perpendicular to the horizontal plane, in order to avoid errors, this embodiment constructs a world coordinate system and calculates the pose matrix of the camera coordinate system relative to the world coordinate system. This embodiment is described in Embodiment 3 On top of that, it also includes:
[0152] Step 31, obtain the acceleration of gravity g from the three-axis accelerometer installed on the infrared light emitting device in the reference coordinate system X r component g on the axis xr , Y r component g on the axis yr ,Z r component g on the axis zr ;
[0153] Step 32, since the direction of gravity is always consistent with the Z of the world coordinate system w Axis coincidence, when the reference coordinate system rotates relative to the world coordinate system, g can be used xr , g yr , g zr , the pose matrix of the reference coordinate system relative to the world coordinate system is obtaine...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More