

Unmanned aerial vehicle invasion detection and identification system based on visual sense and method thereof
An intrusion detection and identification system technology, applied in image data processing, instruments, calculations, etc., can solve the problems of small effective detection area, difficult detection and discovery, and slow flight speed, so as to improve the monitoring range, good detection effect, and improve The effect of speed of recognition
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described below in conjunction with drawings and embodiments.
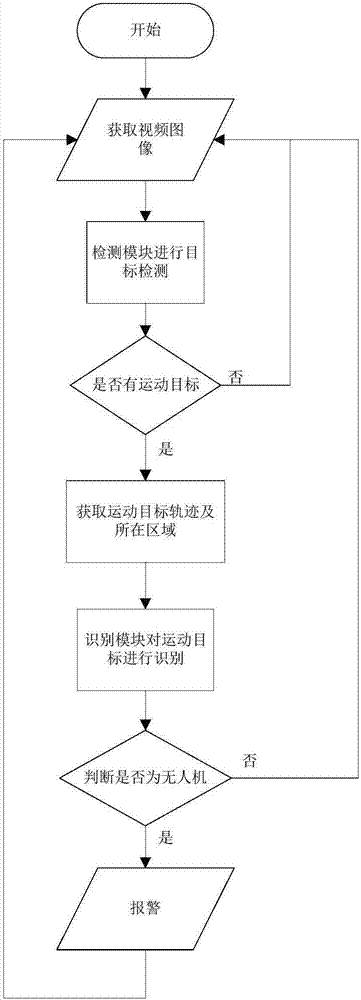
[0039] figure 1 It is a flow chart for real-time detection and positioning of the system. First, the camera collects video information, and performs real-time detection through the target detection module. If no moving target is found, continue to collect video information; to identify. If the moving target is not a UAV, continue to collect video information; if the target is a UAV, an alarm will be issued.
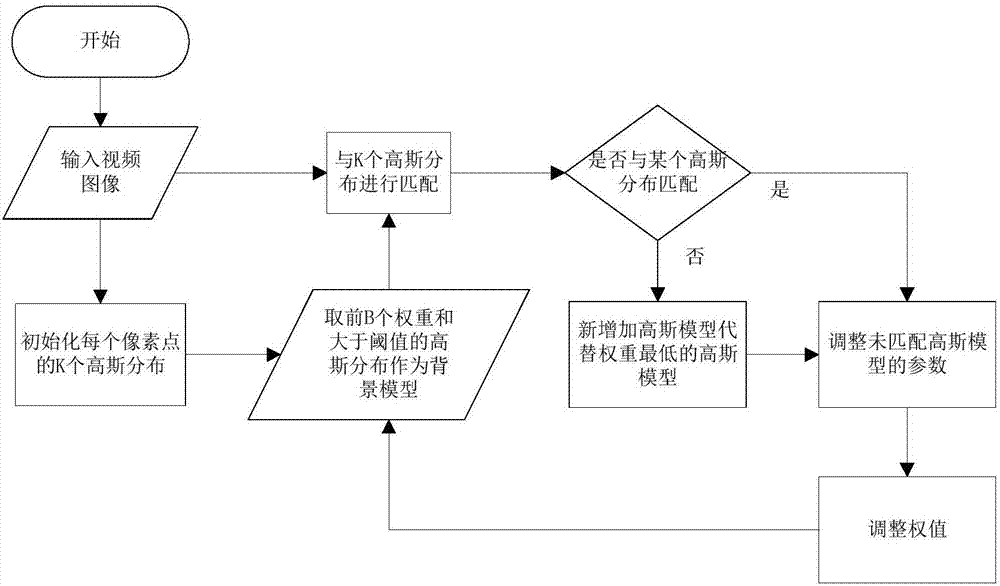
[0040] figure 2 Modeling and updating flowcharts for mixed Gaussian backgrounds. First, K Gaussian distributions of each pixel are initialized, and the weight is 1 / K. The value of each pixel of the first frame image is taken as the distribution mean of K mixed Gaussian models, and the covariance is taken as a larger value. At time t, a matching test is performed on each pixel of the current frame and its corresponding mixed Gaussian model. If there is a match...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More