

Intelligent drilling machine based on six-degree-of-freedom parallel robot
A degree of freedom, robot technology, used in boring/drilling, drilling/drilling equipment, metal processing machinery parts, etc., can solve problems such as poor drilling accuracy, low efficiency, and poor manual positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
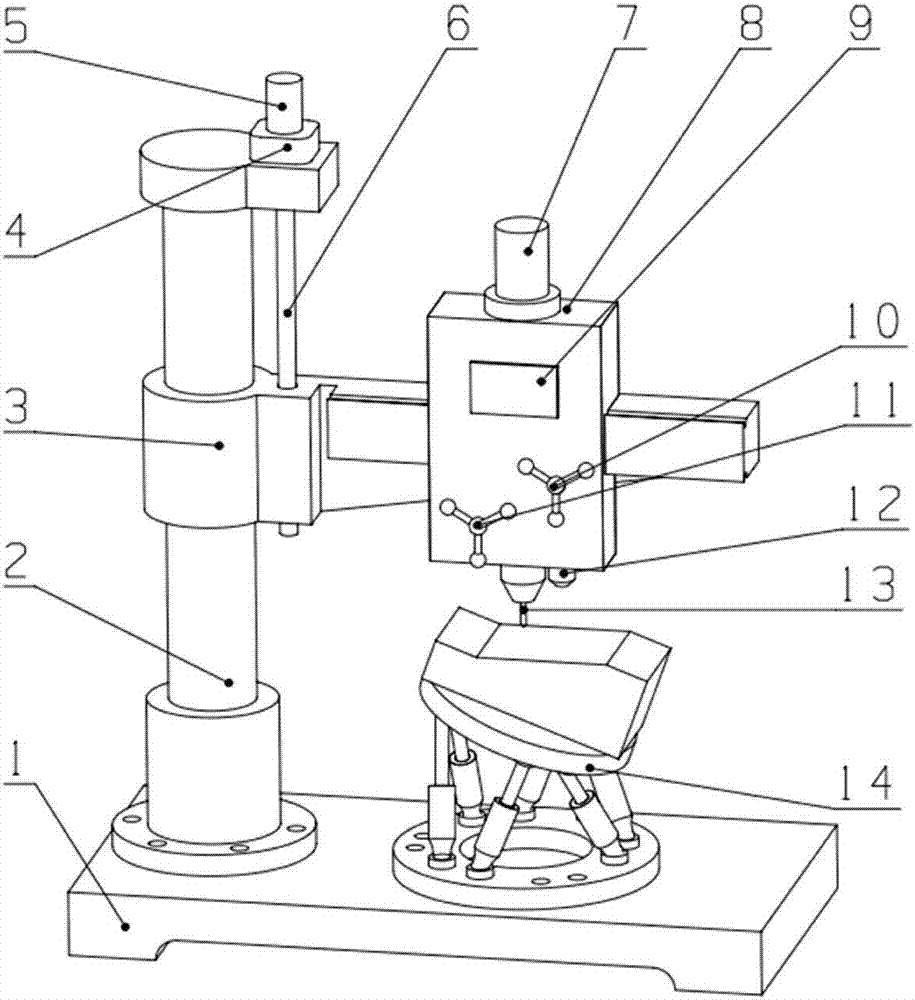
[0032] See attached figure 1 , the intelligent drilling machine based on six degrees of freedom parallel robot of the present invention comprises:
[0033] base 1;
[0034] A column 2 whose lower end is fixedly connected to the base 1 by bolts;
[0035] One end of the rocker arm 3 is sleeved on the column 2, and the rocker arm 3 is driven by a vertical motion drive mechanism to slide up and down relative to the column 2;
[0036] The spindle box 8 that moves relative to the rocker arm 3 left and right;
[0037] A drill bit 13 protruding from the lower end of the headstock 8 and connected to the main shaft 8-1 in the headstock 8 and capable of rotating and feeding;
[0038] The displacement sensor 12 fixed on the lower end of the spindle box 8, the main shaft 8-1 protrudes from the outer cylindrical surface of one end connected to the spindle box 8 an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More