

Large-scale underwater network positioning method based on recursion position estimation
A network positioning, large-scale technology, applied in measurement devices, open-air water source surveys, complex mathematical operations, etc., can solve problems such as low positioning accuracy and small coverage, achieve good applicability, high network coverage, and improve network average. The effect of positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
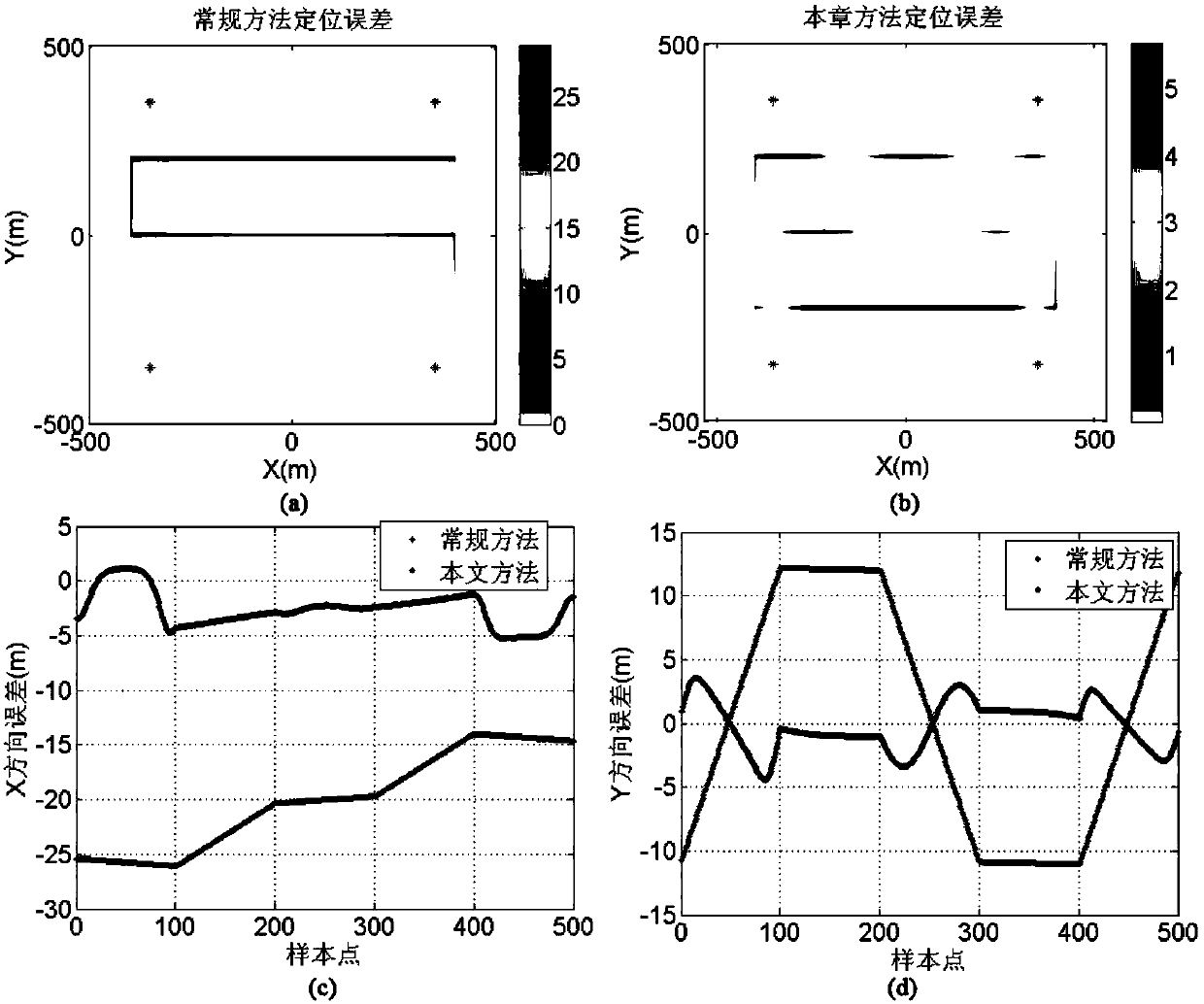
[0110] The accuracy of the results of the method proposed by the present invention and the conventional intersection solution method is compared.
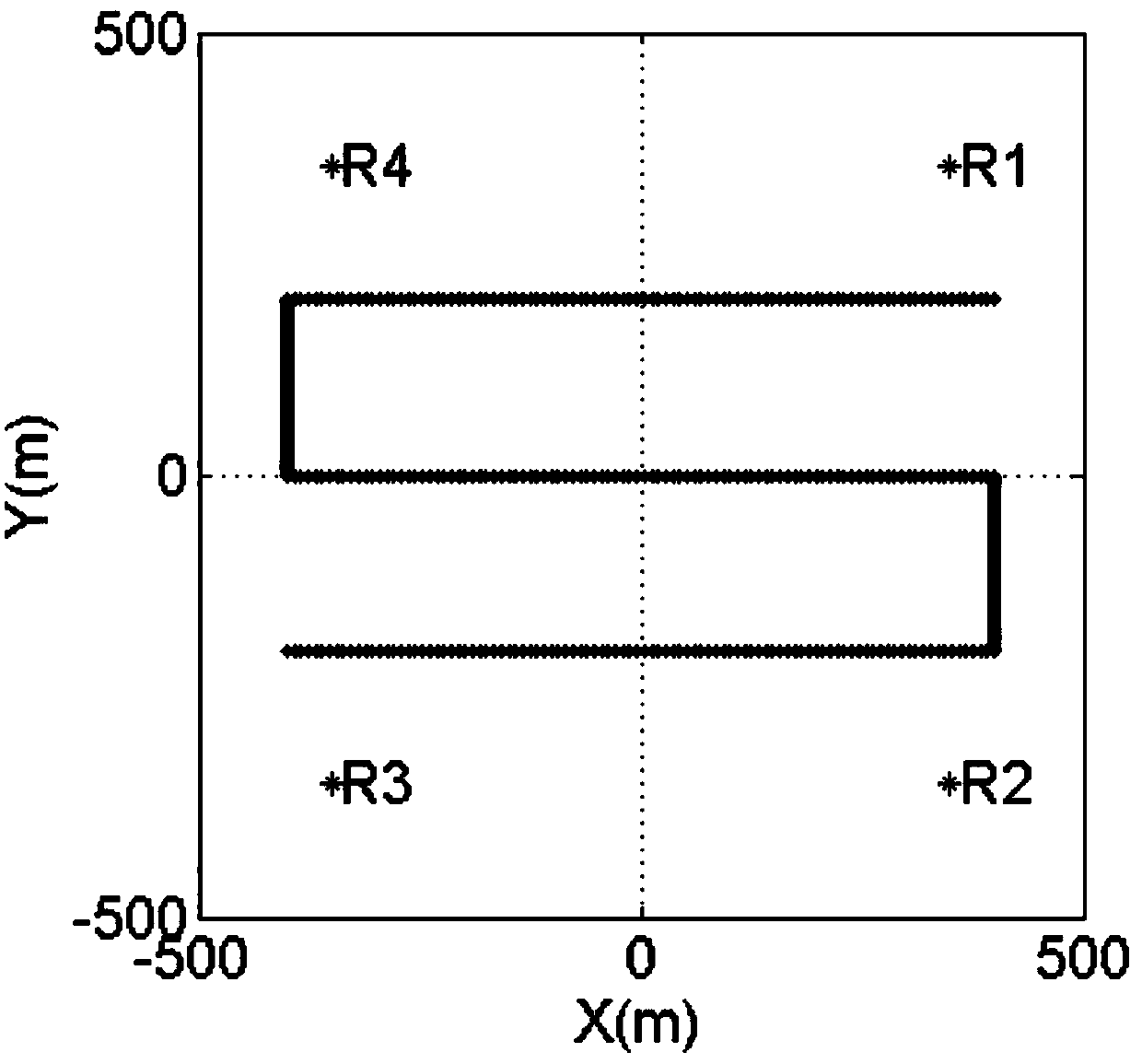
[0111] Four reference nodes are used in the simulation. Since the underwater sensor nodes are equipped with pressure sensors, the depth information is used as a known quantity in the following simulation, and the corresponding underwater positions are R1 (350m, 350m), R2 (350m, -350m ), R3 (-350m, -350m), R4 (-350m, 350m). Ordinary nodes are in the area surrounded by reference nodes, and the horizontal movement trajectory is as follows: figure 2 shown. In the simulation, a random error of 0.1m as the standard deviation is added to the distance measurement, and a positioning error of 10m is introduced to the 4 reference nodes, and the position coordinates of the 4 reference nodes are obtained as R1 (360m, 360m), R2 (340m, -340m), R3 (-360 m, -360m), R4 (-340m, 340m), take the above coordinates as a reference for common node posit...
Embodiment 2
[0116] The selection criteria of two traditional common nodes upgraded to reference nodes are compared with the selection criteria of the present invention, and the average positioning error and network coverage of network nodes are simulated, and the results are as follows Figure 4 shown.
[0117] Four reference nodes are used in the simulation. Since the underwater sensor nodes are equipped with pressure sensors, the depth information is used as a known quantity in the following simulation, and the corresponding underwater positions are R1 (350m, 350m), R2 (350m, -350m ), R3 (-350m, -350m), R4 (-350m, 350m). Ordinary nodes are in the area surrounded by reference nodes, and the horizontal movement trajectory is as follows: figure 2 shown. In the simulation, a random error of 0.1m as the standard deviation is added to the distance measurement, and a positioning error of 10m is introduced to the 4 reference nodes, and the position coordinates of the 4 reference nodes are ob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More