

Multi-modal interaction method and device for intelligent robots
A technology of intelligent robots and interactive methods, applied in the field of multi-modal interactive methods and devices, can solve problems such as resource occupation and reduce the processing efficiency of intelligent robots, and achieve the effects of reducing occupation, improving resource utilization efficiency, and avoiding adverse effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
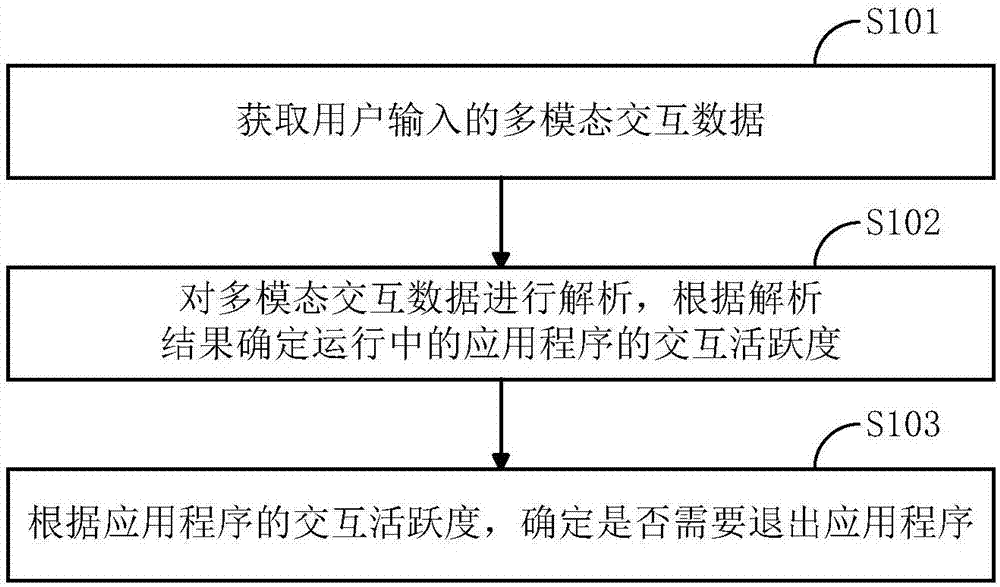
[0040] figure 1 A schematic flow chart showing the implementation of the multi-modal interaction method for intelligent robots provided by this embodiment is shown.
[0041] Such as figure 1 As shown, the multimodal interaction method provided by this embodiment first obtains the multimodal interaction data input by the user in step S101. It should be pointed out that in this embodiment, according to actual needs, the multimodal interaction data acquired in step S101 of the method may contain different forms of interaction information. For example, the above-mentioned multimodal interaction data may include not only voice information, but also text information, and other information such as image information, or a combination of various forms of information.
[0042] In step S101, the method can use the audio acquisition device (such as a microphone) configured by the intelligent robot to obtain voice information, use the text acquisition device (such as a keyboard) configur...
Embodiment 2
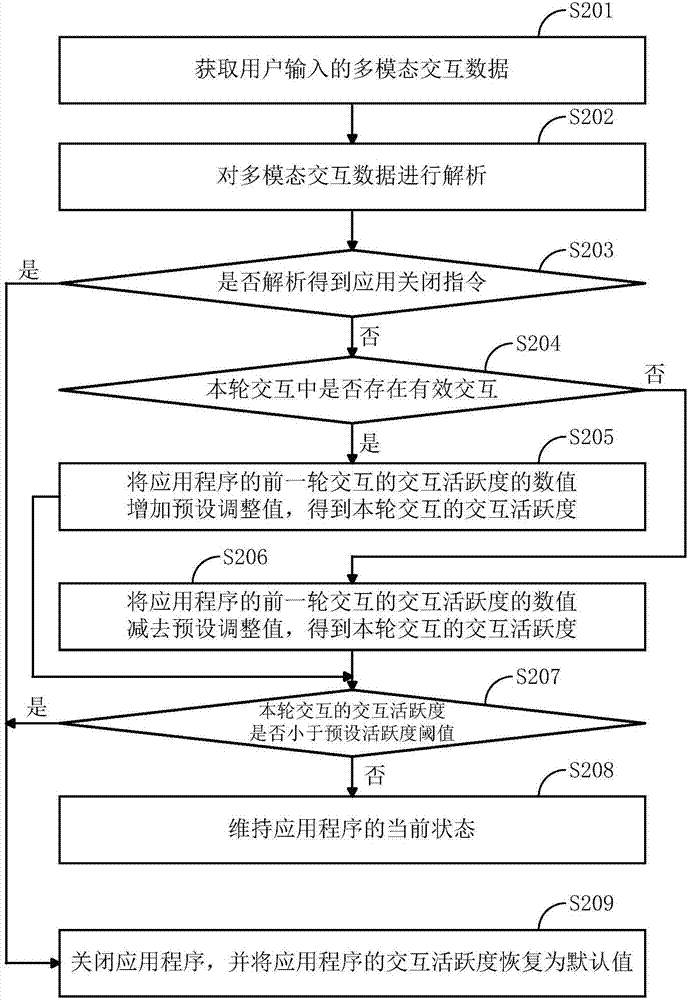
[0050] figure 2 A schematic flow chart showing the implementation of the multi-modal interaction method for intelligent robots provided by this embodiment is shown.
[0051] Such as figure 2 As shown, the multimodal interaction method provided by this embodiment first obtains the multimodal interaction data input by the user in step S201. It should be pointed out that, in this embodiment, the specific implementation principle and implementation process of step S201 are the same as the specific implementation principle and implementation process of step S101 in the first embodiment above, so the related content of step S201 will not be repeated here.
[0052] After getting the multimodal interaction data input by the user, such as figure 2 As shown, the method will analyze the multimodal interaction data obtained in step S201 in step S202, and obtain an application closing instruction in step S203 according to whether it is analyzed or not.
[0053] Wherein, if the applic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More