

Method and device for acquiring coordinates of point cloud by oblique photography
A technology of oblique photography and oblique shooting, which is applied in the field of surveying and mapping, can solve the problems of large error of point cloud data, inconsistency between point cloud position and actual position, etc., to improve accuracy, reduce uneven change of point cloud elevation, and overcome the problem of forced distribution Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
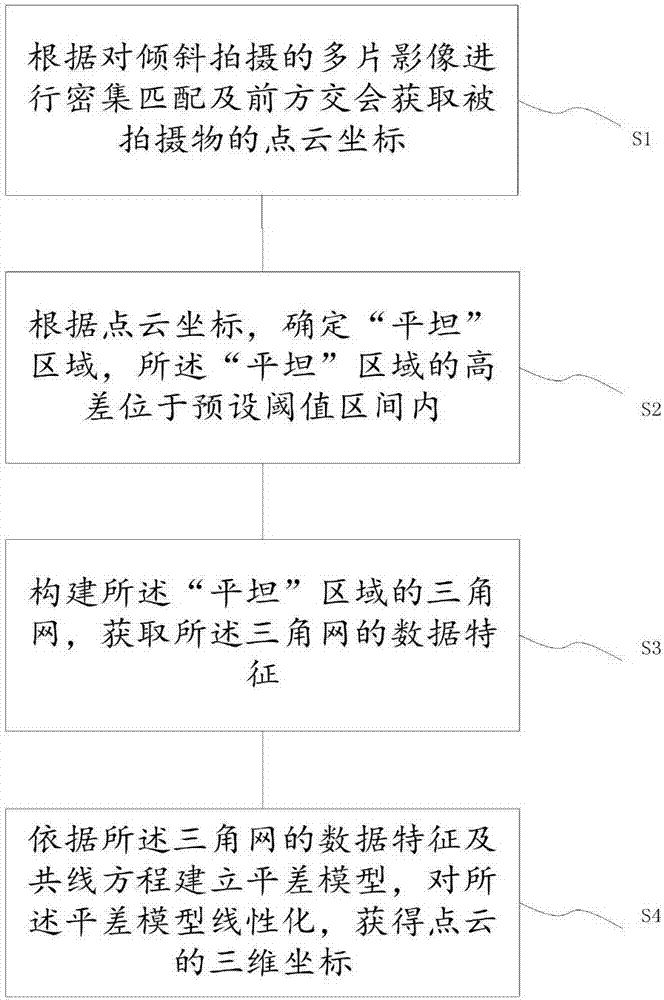
[0039] Specific as figure 1 As shown, this embodiment provides a method for oblique photography to obtain point cloud coordinates, including:
[0040]S1: Obtain the point cloud coordinates of the subject based on dense matching and forward intersection of multiple images taken at an angle;
[0041] S2: Determine a "flat" area according to the point cloud coordinates, and the height difference of the "flat" area is within a preset threshold range;
[0042] S3: Construct the triangulation network of the "flat" area, and obtain the data characteristics of the triangulation network;
[0043] S4: Establish an adjustment model according to the data characteristics of the triangulation and collinear equations, linearize the adjustment model, and obtain the three-dimensional coordinates of the point cloud.
[0044] The method for obtaining point cloud coordinates by oblique photography provided by the embodiment of the present invention first uses the overlapping images obtained by ...
Embodiment 2
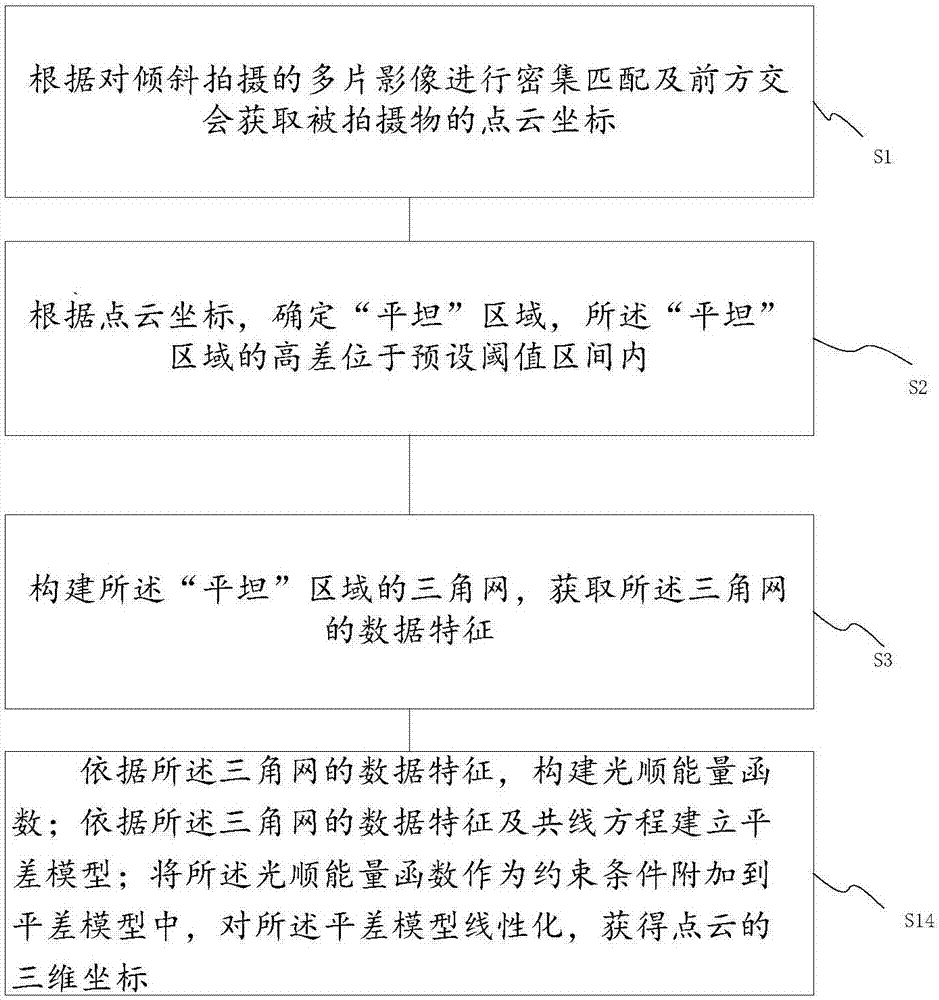
[0048] Specific as figure 2 As shown, this embodiment 2 is optional on the basis of embodiment 1. The above-mentioned adjustment model is established based on the data characteristics of the triangulation network and the collinear equation, and the adjustment model is linearized to obtain the three-dimensional coordinates of the point cloud , including S14, specifically S14 is:
[0049] Constructing a smooth energy function according to the data characteristics of the triangulation;
[0050] An adjustment model is established according to the collinear equation;
[0051] Add the smoothing energy function as a constraint to the adjustment model, linearize the adjustment model, and obtain the three-dimensional coordinates of the point cloud, thereby, using the smoothing energy function as a constraint, construct an error equation and solve Realize the rigorous calculation of the three-dimensional space coordinates of the global optimal multi-slice space forward intersection, ...
Embodiment 3
[0055] combine Figure 4 As shown, this embodiment 3 makes the following optimizations for the above-mentioned embodiment 1 and embodiment 2. In this embodiment, multi-chip dense matching is first performed, and then the initial rigorous calculation, "flat" area detection and constraints are sequentially performed. Rigorous calculations under the conditions.
[0056] Among them, the initial rigorous solution includes the initial solution of beam method forward intersection (least squares solution); "flat" area detection includes "flat" area detection and the construction of triangulation; the rigorous calculation under constraint conditions includes grid fairing energy Function construction, error equation construction and rigorous value solution.
[0057] In the method for obtaining point cloud coordinates by oblique photography provided by the embodiment of the present invention, the calculation process of point cloud coordinates is: multi-slice dense matching--beam method ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More