

Optimized parameterization of active disturbance rejection control
A parameter and controller technology, applied in the direction of adaptive control, program control, digital control, etc., can solve problems such as performance degradation and system tuning difficulties
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
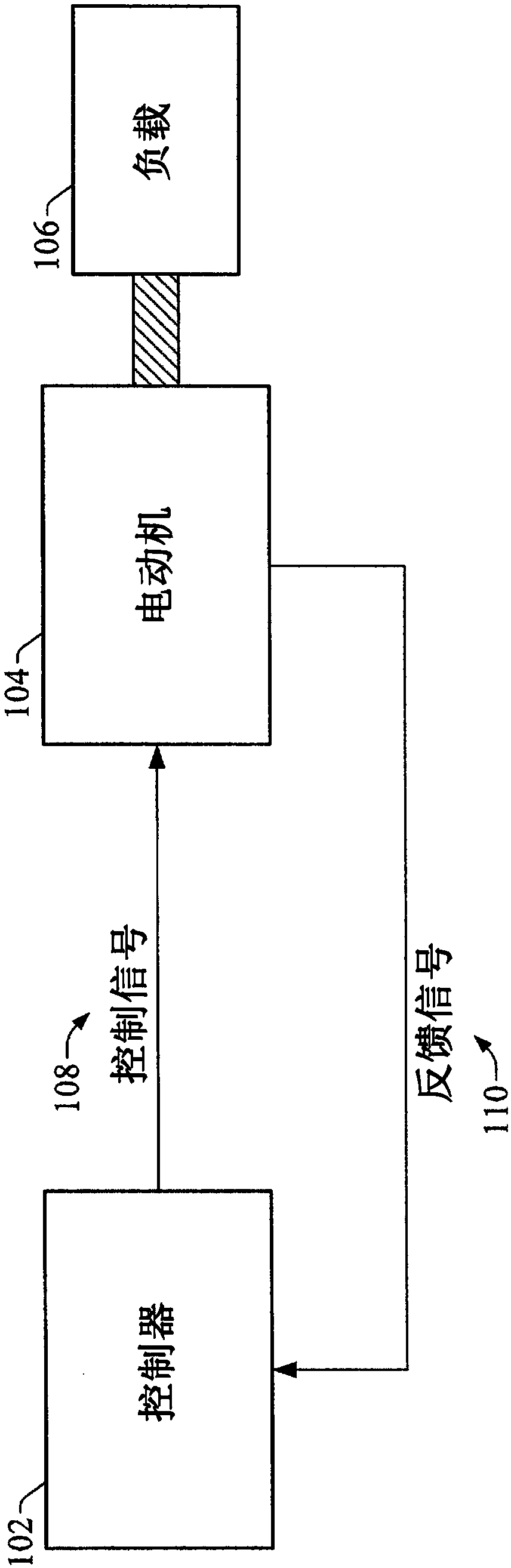
[0021] The systems and methods described herein relate to techniques for reducing or eliminating undesired oscillations in controlled mechanical systems using simplified tuning procedures. According to one or more embodiments, a control method is used to establish the plant parameters of the controlled system and the tuning parameters of the parameterized active disturbance rejection controller determined to be optimal or substantially optimal for the controlled system The relationship between. The object parameters can include the system gain, time constant and dead time of the system such that the identified system dead time is taken into account when establishing these relationships. Corresponding tuning parameters can include controller bandwidth and system gain estimates. Using system gain estimates as tuning parameters as described herein can mitigate the effects of dead time or phase lag on systems controlled using parametric ADRC principles.
[0022] Once these fixed...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More