

Unmanned surface vessel formation control method based on leader follow-up structure
A control method and technology of surface boats, applied in the field of formation control of unmanned surface boats, capable of solving problems such as insufficient execution capability of a single unmanned surface boat
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
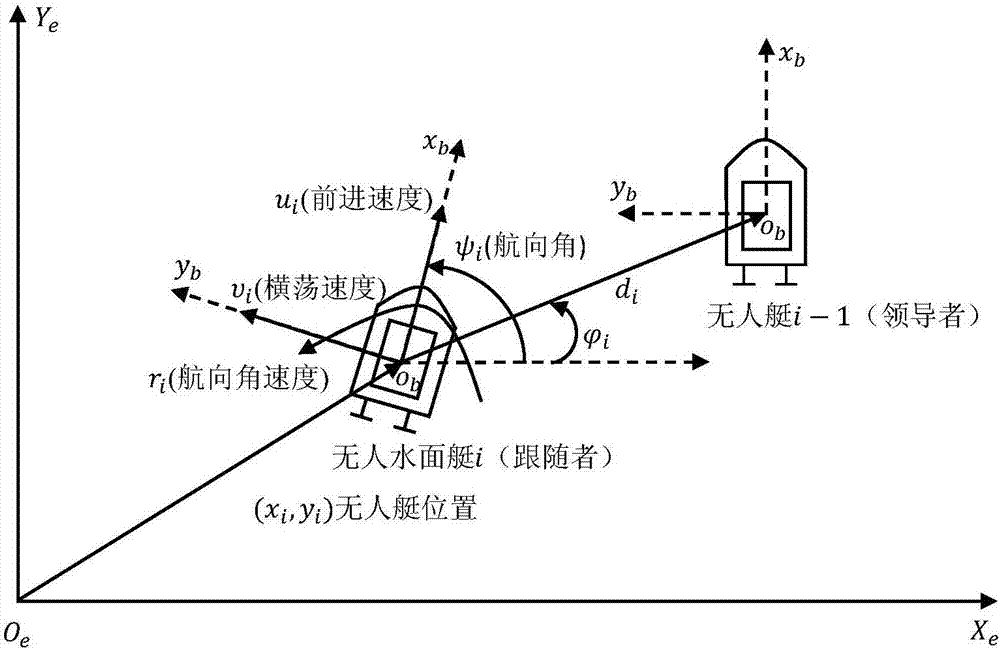
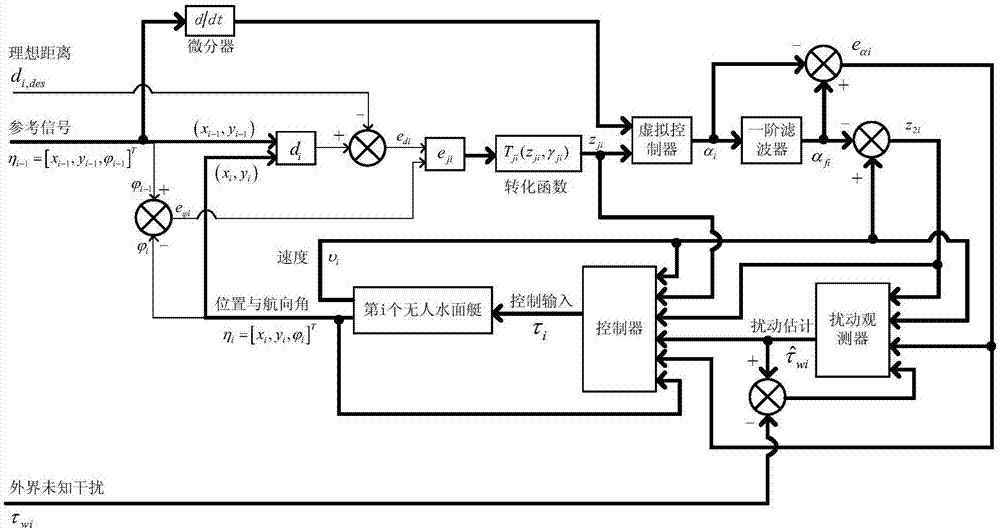
[0055] This embodiment provides a method for controlling the formation of unmanned surface vehicles based on the leader-follower structure. This method aims at the problems of preventing collision and maintaining connection in the formation control of unmanned surface vehicles, and transforms these two problems into constraints of position tracking error. Problem, a formation control method based on the leader-follower structure is proposed. The schematic diagram of the leader-follower formation structure of multiple unmanned surface vehicles is as follows figure 1 As shown, the structural block diagram of the formation control system of multiple unmanned surface vehicles is as follows: figure 2 As shown, the method specifically includes the following steps:
[0056] Step (1), setting up the dynamic model of a plurality of unmanned surface vehicles;
[0057] The dynamic model of described multiple unmanned surface craft is:
[0058]
[0059] Among them, u i Indicates th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More