

Integrated rotation driving executor
A rotary drive and actuator technology, applied in the field of robotics, can solve problems such as the circuit is susceptible to external interference, weak overload capacity, and damage to expensive equipment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
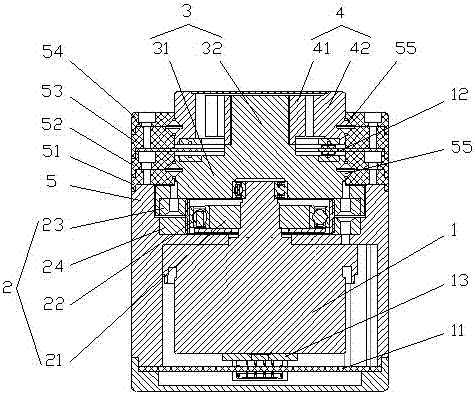
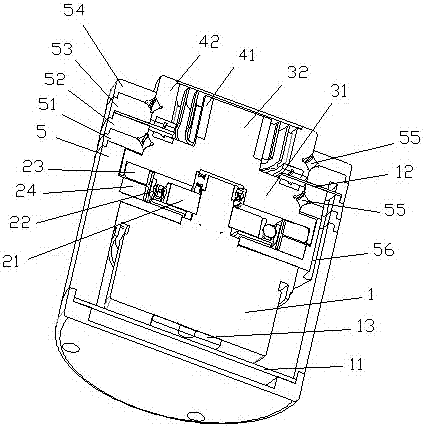
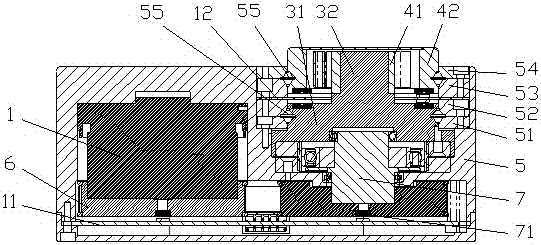
[0035] Please refer to Figure 1 to Figure 3 , figure 1 It is a cross-sectional view of the first specific embodiment of the integrated rotary drive actuator provided by the present invention, figure 2 for figure 1 Another cross-sectional perspective view of the integrated rotary drive actuator shown, image 3 It is a sectional view of the second embodiment of the integrated rotary drive actuator provided by the present invention.
[0036] In a specific embodiment, the present invention provides an integrated rotary drive actuator, including a motor 1, a coaxial reducer 2 and a shaft flange 3; the motor 1 is provided with a motor encoder, and is driven by a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More