

Ship detection method in bridge collision avoidance system
An anti-collision system and detection method technology, applied in the field of image recognition, can solve the problems of system missed detection, contour fracture, slow movement speed, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
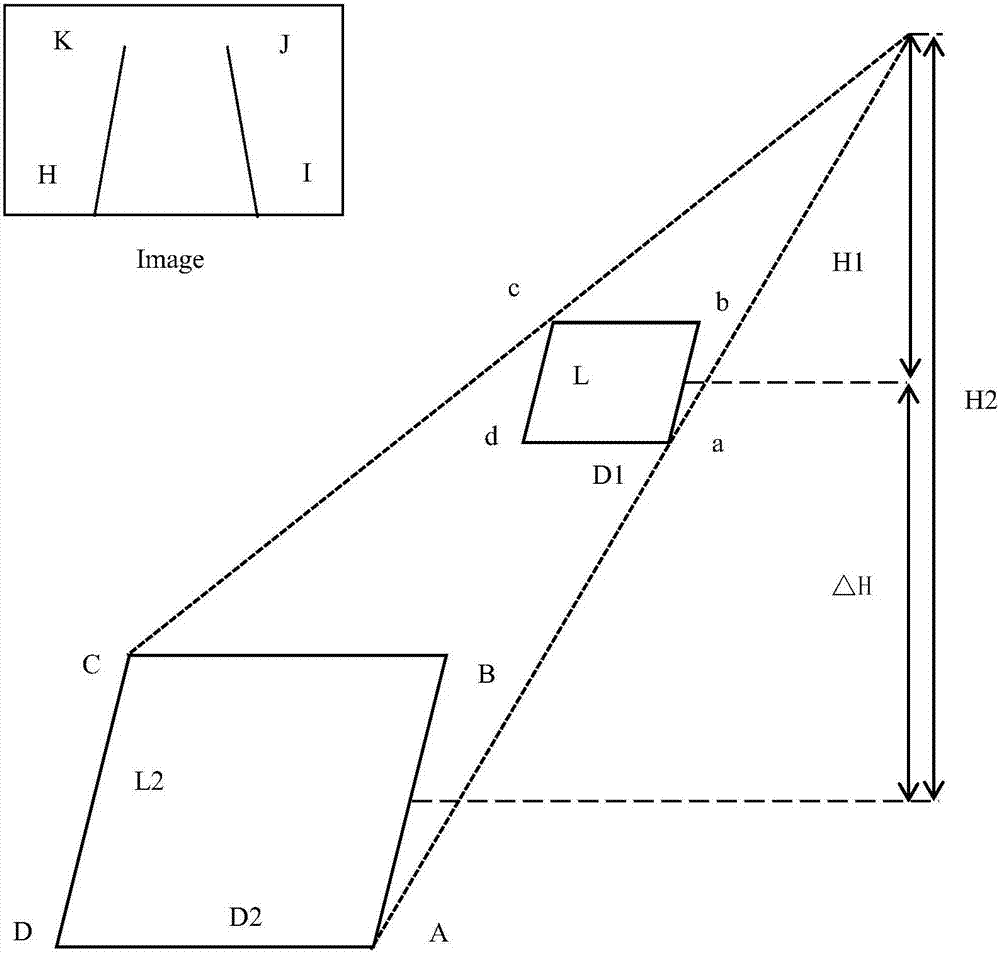
[0070] Such as figure 1 As shown, the straight lines HK and IJ in the Image are the calibrated virtual waterways; a, b, c, and d are the corresponding coordinate points of the water surface coordinate points A, B, C, and D on the checkerboard plane; H, I, and J , K is the pixel coordinate points obtained through calibration of a, b, c, d; L2 is the width of the navigation port, D2 is the monitoring distance; H1 is the distance from the camera to the checkerboard plane; H2 is the distance from the camera to the water surface.
[0071] A camera calibration and ship timing speed measurement steps disclosed in this embodiment include:
[0072] R1. Using Zhang Zhengyou’s single-plane checkerboard method, take 25 checkerboard photos from different angles, calculate the camera’s internal parameter matrix, deformation parameters, translation vectors, rotation vectors, etc., and store them in an XML file for the next call;
[0073] R2. Install the camera above the center of the naviga...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More