

Non-smooth technique-based direct yaw moment control method of electric vehicles
A technology of yaw moment and control method, which is applied in electric vehicles, control drives, control devices, etc., can solve the problems that direct yaw moment control is difficult to obtain control effects, the controller is discontinuous, and the system collapses, and achieves rapid convergence. performance, reducing energy loss and mechanical structure loss, the effect of good robust performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The invention provides a direct yaw moment control strategy of an electric vehicle based on non-smooth technology. In order to make the object, technical solution and effect of the present invention more clear and definite, the present invention will be further described in detail below with reference to the accompanying drawings and examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
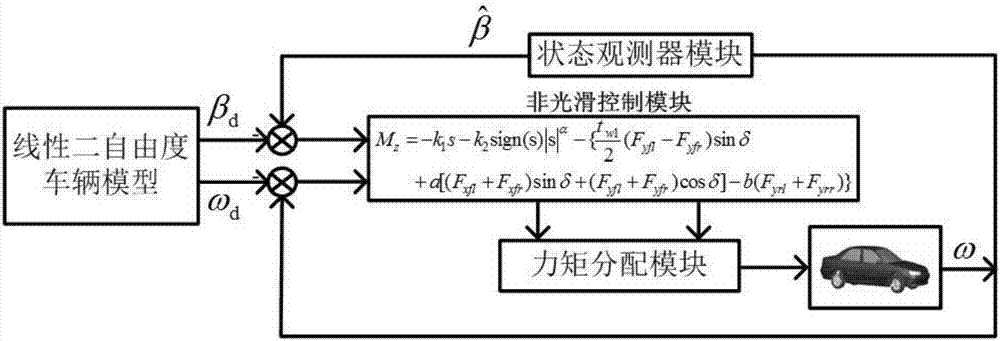
[0026] figure 1 Shown is the system relationship schematic diagram of tire lateral force estimation of the present invention, and it comprises 1, linear two degrees of freedom vehicle model 2, Carsim software (seven degrees of freedom vehicle model) 3, the state observer 4 of center of mass side slip angle, Non-smooth control module 5, torque distribution module
[0027] Based on the above-mentioned system, explain the present invention to the vehicle stability control method ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More