

Archimedes spiral-based adjustable scanning device and method for resolution region
An Archimedes spiral and mechanical scanning technology, which is applied in the direction of measuring devices, analyzing materials, and using sound waves/ultrasonic waves/infrasonic waves for material analysis, etc., can solve the problems of high complexity of mechanical devices and control modules, and the deviation between the actual position of the probe and the theory , Scanning image stitching adverse effects and other issues, to achieve the effect of improving efficiency and reducing system complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0020] Embodiment 1: A mechanical device for realizing Archimedes spiral polar coordinate plane scanning
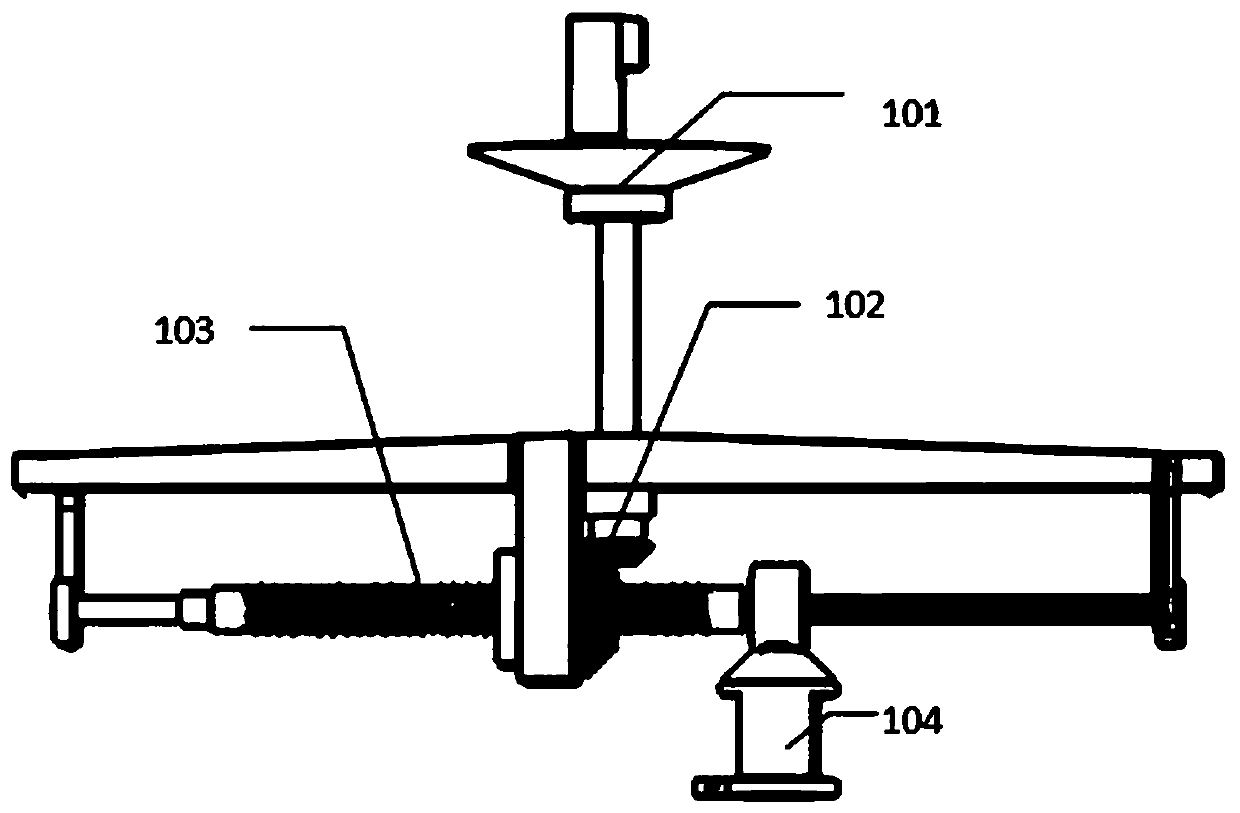
[0021] Such as figure 1 It is an implementation case of the device of the invention to realize angular rotation and radius axial transmission. In this embodiment, the cooperation between the bevel gear and the screw rod is used to realize the linkage between rotation and axial translation. Wherein 101 is a motor driving end, 102 is a bevel gear, which links the rotation of the motor with the rotation of the screw rod, 103 is a screw rod, and 104 is a slide block for installing a probe. When the motor rotates, it will drive the bevel gear to rotate, and at the same time drive the screw to rotate, so that the slider 104 will move horizontally in the radial direction, superimposed angular rotation, and its moving track will form an Archimedes spiral.
[0022] The device is equipped with an angle sensor and a counter in the moving part of the probe. Let the value of the an...
Embodiment 2
[0023] Embodiment 2: A method for determining the scanning interval of plane polar coordinates based on the Archimedes spiral
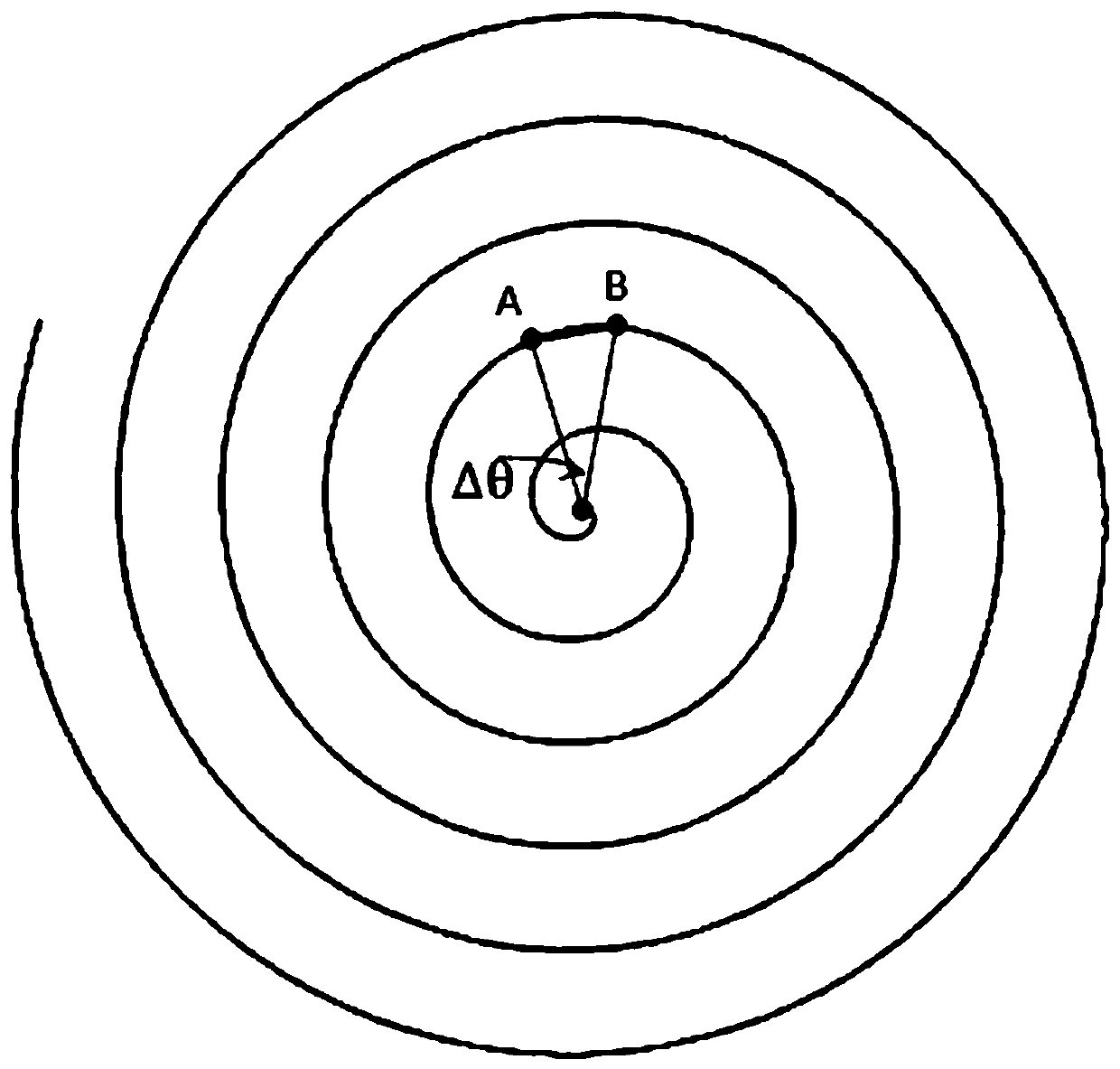
[0024] Such as figure 2 , is a helical scanning trajectory of the inventive scanning device and a schematic diagram of the positions of the sampling points.
[0025] Assuming that the rotational angular velocity of the motor is constant, and the equation of the helix is r=aθ, consider any two adjacent sampling points A on the helix ( ), B ( ), and order , then the distance interval between AB is:
[0026]
[0027] (1)
[0028] In order to make the sampling points distributed as evenly as possible in the plane, consider setting the interval L of the sampling points as a constant value. About Equation (1), the angular interval can be obtained , the position of the next sampling point can be determined. It is worth noting that the radii at different positions of the helix are different, so in the scanning process of this implementat...
Embodiment 3
[0029] Embodiment 3: A plane polar coordinate scanning sampling process based on the Archimedes spiral.
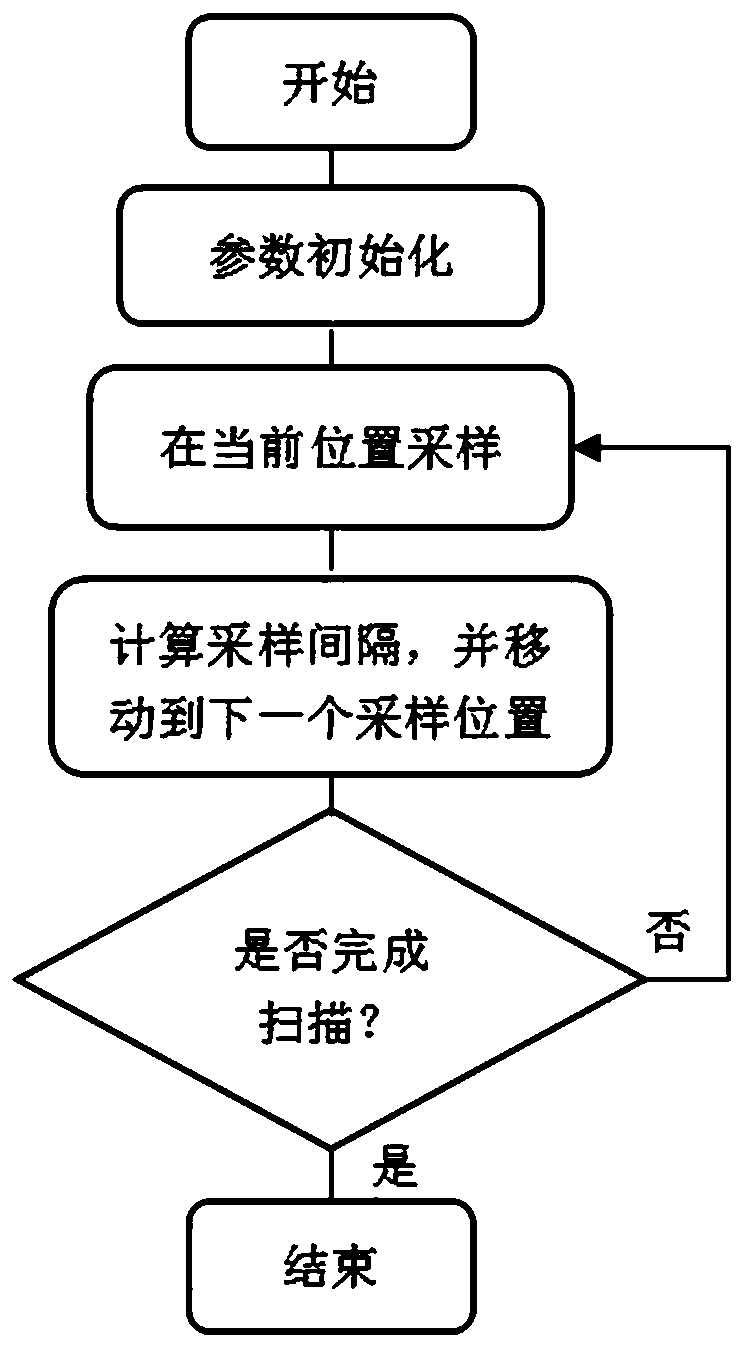
[0030] Such as image 3 , before starting the scan, initialize the basic parameters, including the motor speed, the distance interval L of the sampling point, and set the start point and end point of the scan, that is, determine the scan range. Then emit samples at the current position, and calculate the angular interval of the next sampling point according to the current position . This process is looped until the scan is complete.
[0031] According to actual needs, the sampling interval L can be a constant value for scanning the entire area, or different intervals can be set in different local areas to realize scanning and mosaic imaging with adjustable global or local resolution.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More