

Multi-antenna control method and system, and intelligent equipment
A technology of intelligent equipment and control method, applied to antennas, electrical components, etc., can solve the problems of energy waste, output power drop, waste of antenna communication resources, etc., and achieve the effect of increasing communication radius, increasing output power, and improving communication distance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
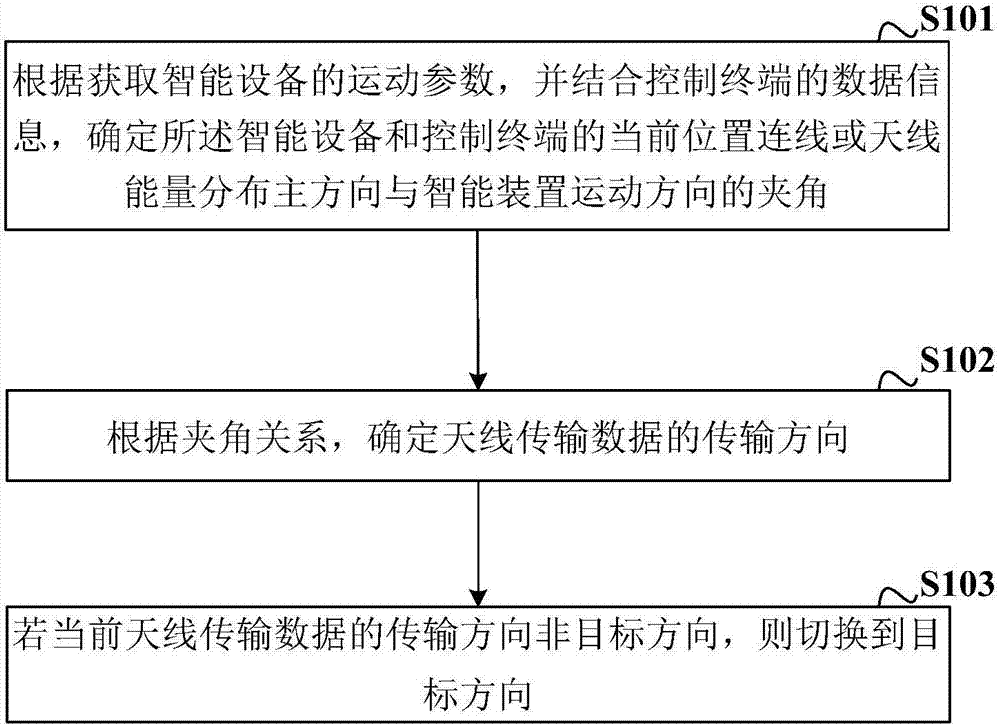
[0059] Such as figure 1 As shown, this embodiment provides an antenna control method, and the specific implementation method includes:
[0060] S101: According to the acquired motion parameters of the smart device, combined with the data information of the control terminal, determine the angle between the current position connection line between the smart device and the control terminal or the main direction of energy distribution and the motion direction of the smart device;
[0061] The antenna control method provided by the embodiment of the present invention is applied to a drone. The drone is a multi-antenna drone. Two or more antennas on the drone are distributed at an angle and their working range covers no one. 360° full body of the machine. The data information of the control terminal includes positioning coordinate data, sensor data, and antenna data of the control terminal. The movement parameters of the UAV include information such as the positioning coordinates,...
Embodiment 2
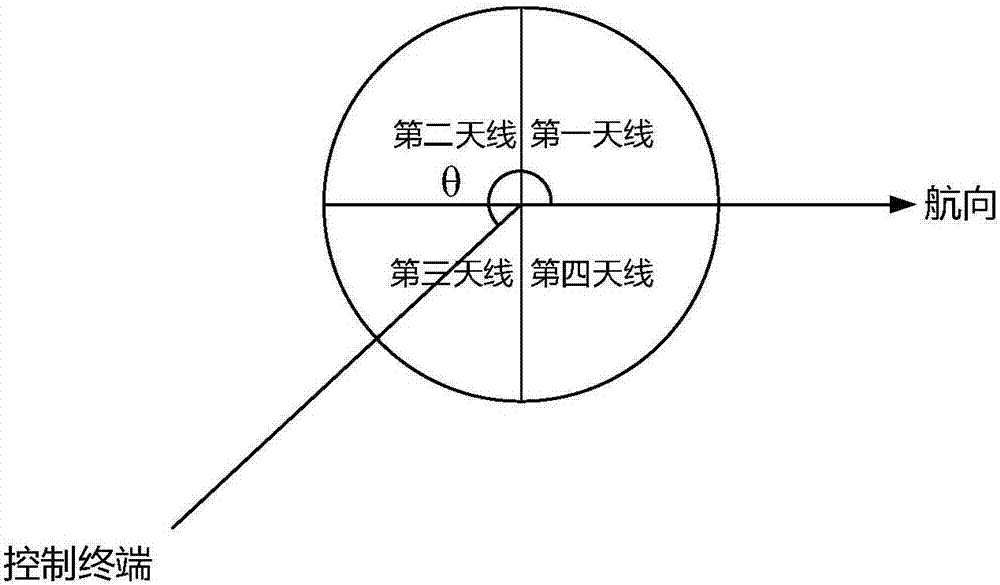
[0073] This embodiment is an antenna control method, and four antennas are arranged on the drone.
[0074] S1: According to the acquired motion parameters of the UAV and combined with the data information of the control terminal, determine the angle between the current position connection line of the UAV and the control terminal and the course of the UAV;
[0075] S2: According to the included angle, determine the transmission direction of the data transmitted by the antenna on the UAV;
[0076] S3: If the transmission direction of the data transmitted by the current antenna is not the target direction, start the antenna working in the target direction and close the current working antenna.
[0077] The motion parameters of the drone include the positioning coordinates, course, speed, and height of the drone; the positioning coordinates are obtained by the GPS device on the drone, and the current heading of the drone is obtained by a magnetic compass, so The moving speed is o...
Embodiment 3
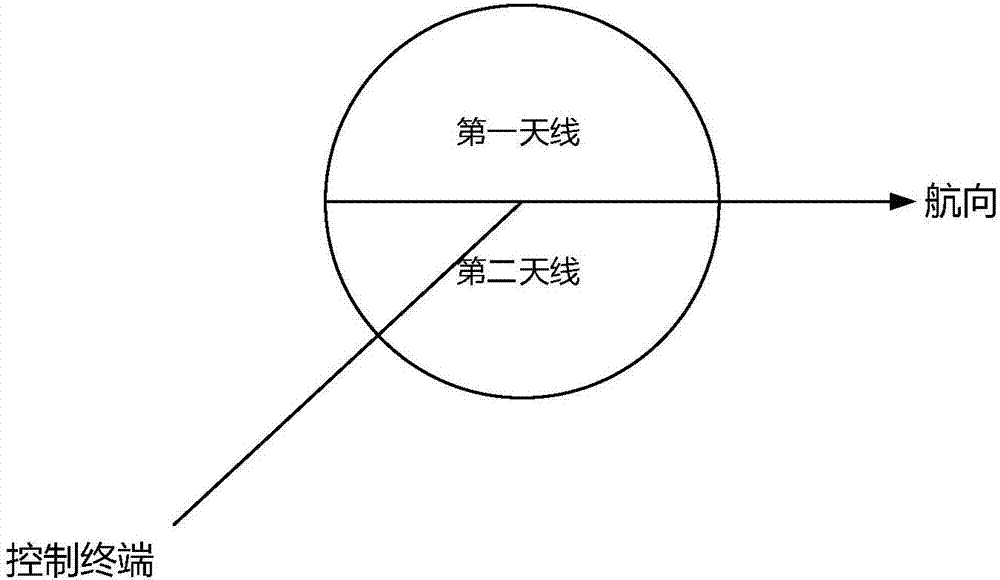
[0095] This embodiment is another antenna control method, such as Figure 5 As shown, there are two antennas on the UAV.
[0096] S1: According to the acquired motion parameters of the UAV, combined with the data information of the control terminal, determine the angle between the connection line between the UAV and the current position of the control terminal and the course of the UAV;
[0097] S2: According to the included angle, determine the transmission direction of the data transmitted by the antenna;
[0098] S3: If the current transmission direction of the data transmitted by the antenna is not the target direction, then switch the phase of the antenna transmitting and receiving electromagnetic waves to the target direction.
[0099] The motion parameters of the drone include the positioning coordinates, course, speed, and height of the drone; the positioning coordinates are obtained by the GPS device on the drone, and the current heading of the drone is obtained by a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More