

Position control method of six-degree-of-freedom hydraulic moving platform with connection rod
A motion platform and control method technology, applied in the field of machinery, can solve problems such as the inability to achieve accurate reproduction of six-degree-of-freedom command signals and reduce control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
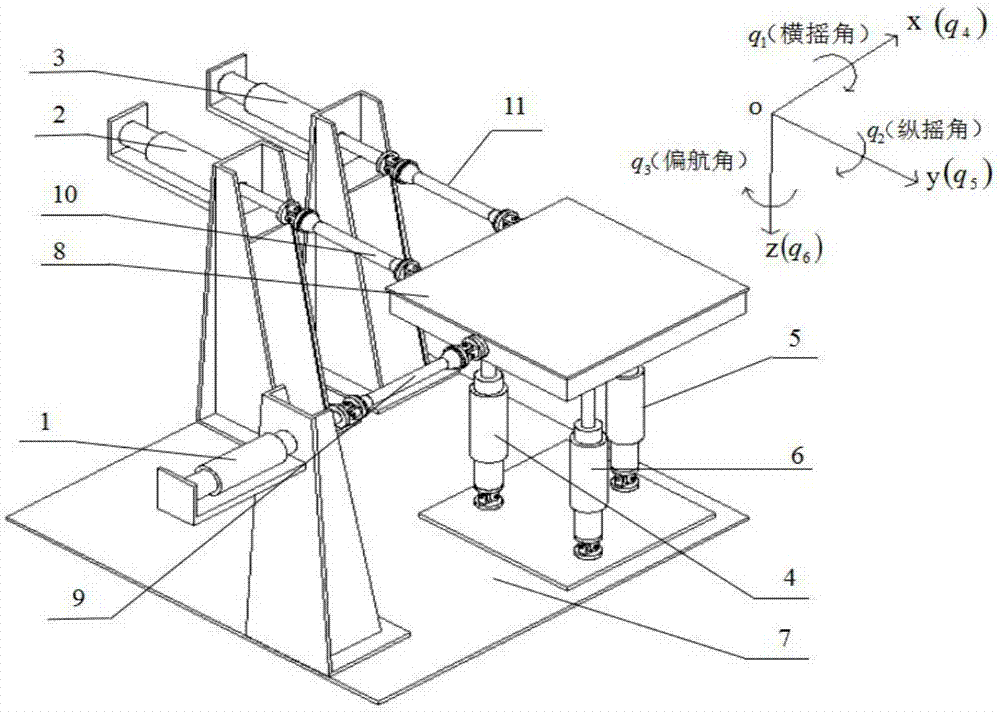
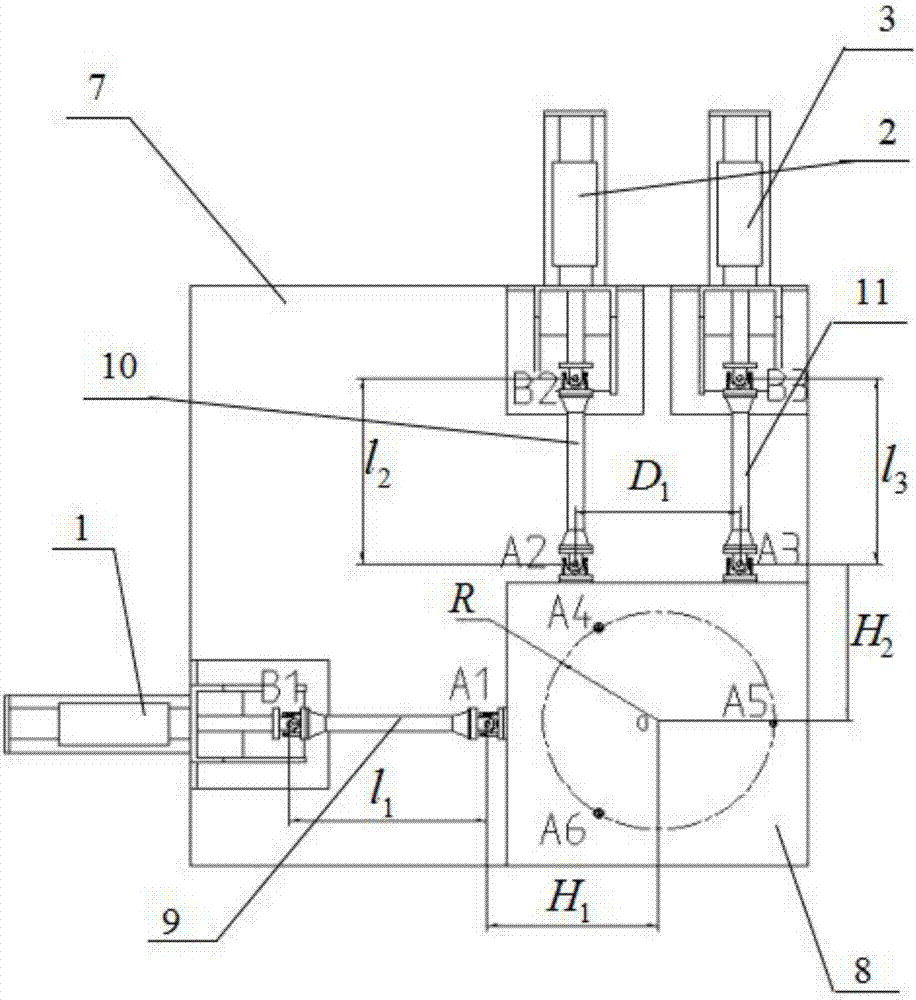
[0071] The present invention will be further described below in conjunction with the accompanying drawings. Such as Figure 1-5 As shown, a control method of a six-degree-of-freedom hydraulic motion platform with connecting rods, the six-degree-of-freedom hydraulic motion platform includes: a lower platform 7, an upper platform 8, three horizontal hydraulic cylinders, three vertical hydraulic cylinders cylinder and three horizontal connecting rods; the three horizontal hydraulic cylinders are No. 1 hydraulic cylinder 1, No. 2 hydraulic cylinder 2 and No. 3 hydraulic cylinder 3; the three vertical hydraulic cylinders are respectively 4 No. hydraulic cylinder 4, No. 5 hydraulic cylinder 5 and No. 6 hydraulic cylinder 6; the three horizontal connecting rods are respectively No. 1 connecting rod 9, No. 2 connecting rod 10 and No. 3 connecting rod 11; No. hydraulic cylinder 1, No. 2 hydraulic cylinder 2 and No. 3 hydraulic cylinder 3 are respectively fixed on the lower platform 7 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More