

A Calculation Method for Optimum Rotation Angular Velocity of Serving Spacecraft when Rotating at Fixed Axis
A technology for serving spacecraft and calculation methods, applied in the field of calculation of optimal rotation angular velocity, can solve problems such as three-axis tumbling motion, damage of docking mechanism, and difficulty in docking of tumbling targets, so as to save energy consumption and enhance safety , enhance the effect of stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described below with reference to the accompanying drawings and embodiments.
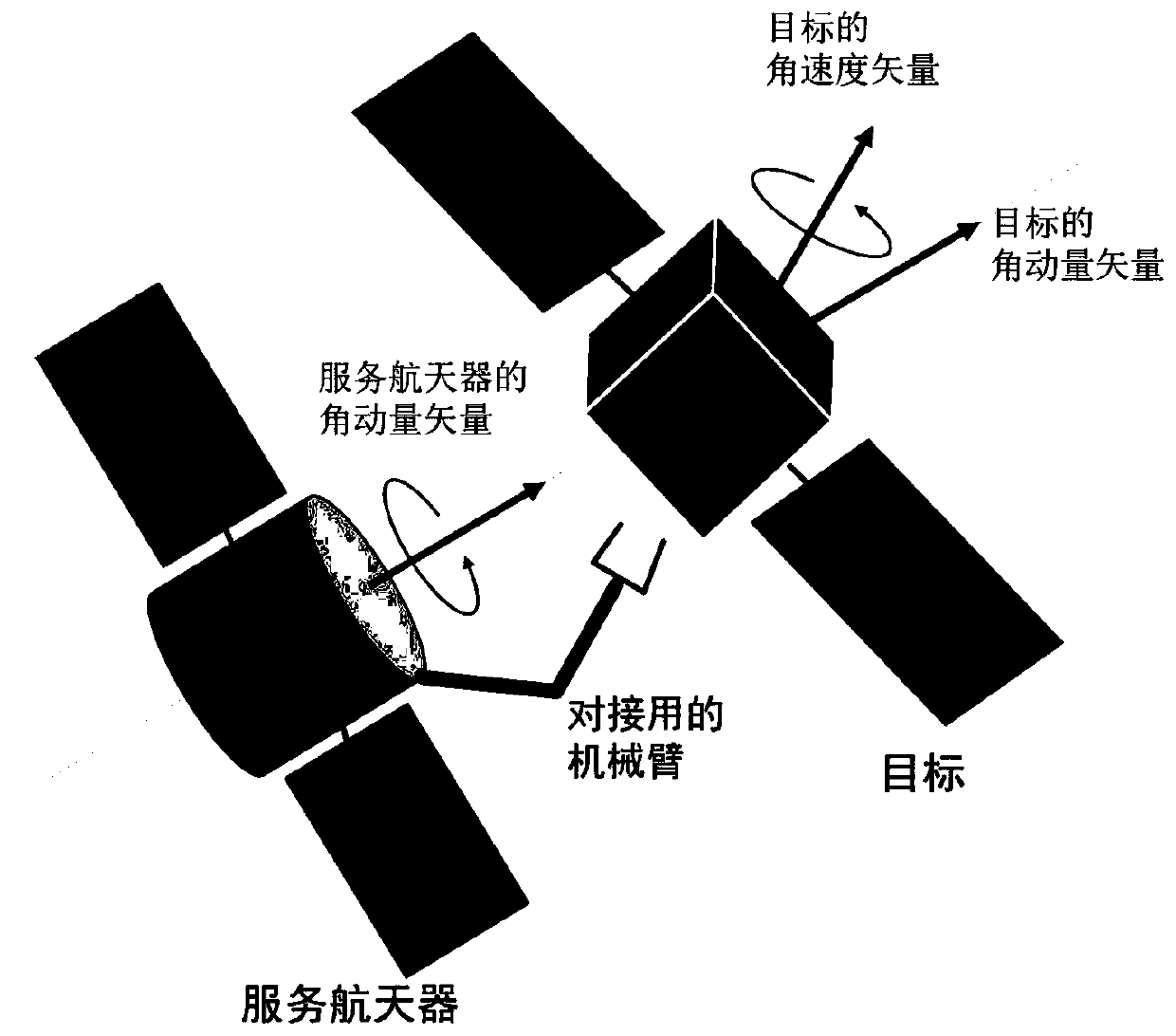
[0035] figure 1 is a schematic diagram of docking with a tumbling target using a rotating service spacecraft. As shown in the figure, since the service spacecraft rotates on a fixed axis, its angular momentum coincides with the direction of angular velocity and points to the direction of the target's angular momentum. Since the target is approximately considered not to be affected by the external moment, its angular momentum is conserved, and the direction of the angular momentum in the inertial coordinate system is fixed. At the same time, since the target performs arbitrary tumbling motion, its angular velocity vector does not necessarily coincide with the direction of angular momentum, and its orientation in the inertial coordinate system generally changes with time.
[0036] Through non-contact measurement methods, such as binocular vision method, l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More