

Device and method for synchronous visual positioning for robots at two sides of wall surface
A technology of robot vision and visual positioning, applied in the directions of instruments, manipulators, general control systems, etc., can solve problems such as insufficient flexibility, inability to locate large spherical tanks and vertical storage tanks, and inability to achieve detection, and achieves the realization of synchronous positioning. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
specific Embodiment
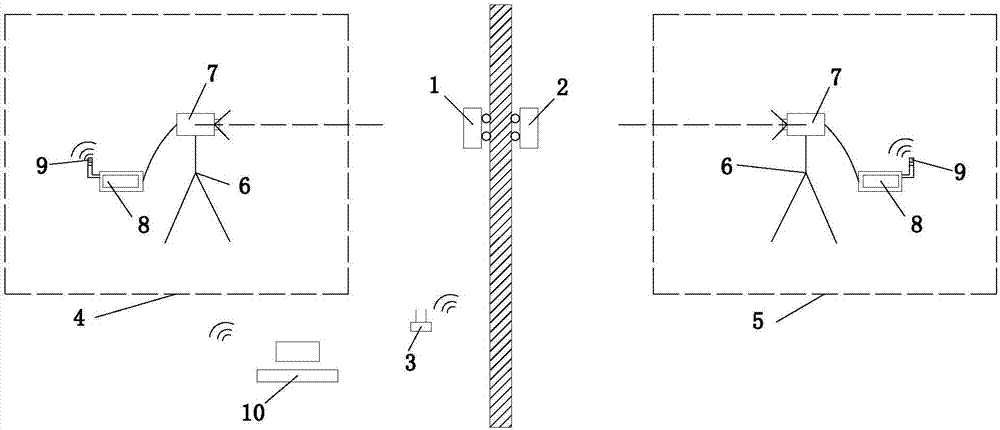
[0029] The embodiment of the present invention uses two permanent magnet adsorption robots, respectively the active robot 1 and the driven robot 2, the wall surface is a steel metal plate with a thickness of 10mm, and both the first visual positioning system 4 and the second visual positioning system 5 are used. USB industrial camera, adjustable bracket, image processor 8 is WAFER-945GSE2 industrial control motherboard, USB wireless network card installed on image processor 8, remote control center 10 uses HPZBOOK15 workstation, wireless repeater 3 uses TP-LINK wireless router. After measuring and positioning on both sides of the wall, set three bilaterally symmetrical marking points with reference to the bottom and edge of the walls on both sides, and set marking points at the geometric centers of the upper ends of the two robots as robot position identification marks. Such as Figure 4 Binarized images on both sides of the wall obtained by the first visual positioning syste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More