

Autonomous mobile fire-fighting robot capable of automatic detection and fire extinguishment, and control method thereof
A technology of fire-fighting robots and autonomous movement, applied in non-electric variable control, target-finding control, two-dimensional position/channel control, etc., can solve problems such as large numbers, fire-fighting facilities that do not meet fire-fighting requirements, and affect fire-fighting effects. Achieve high navigation performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
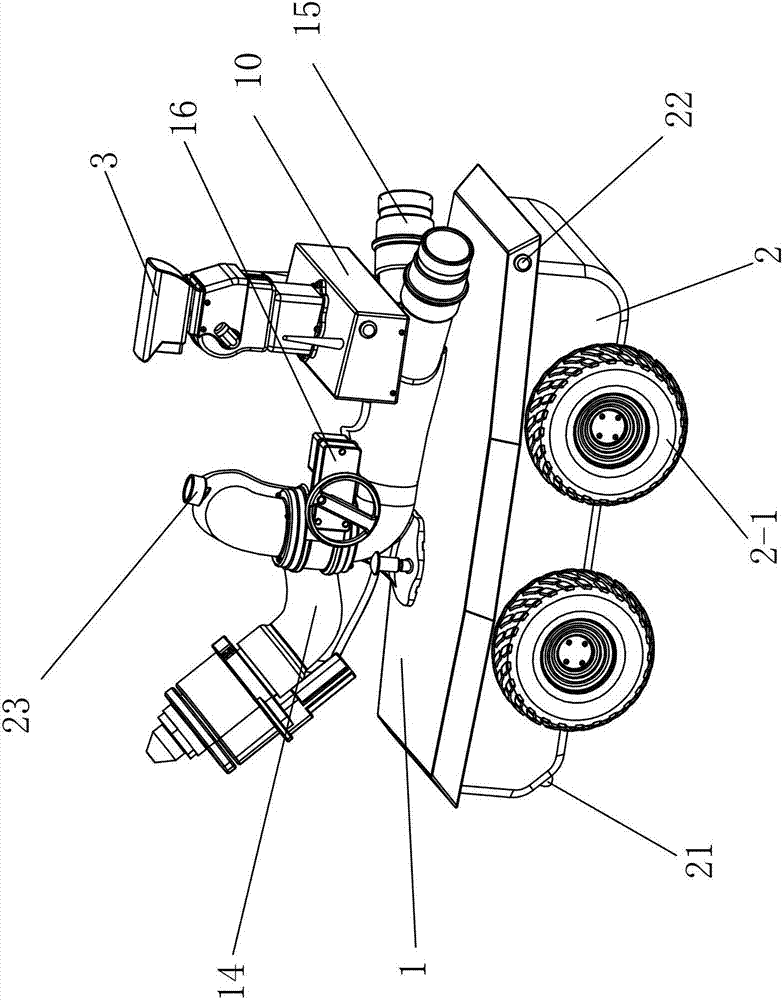
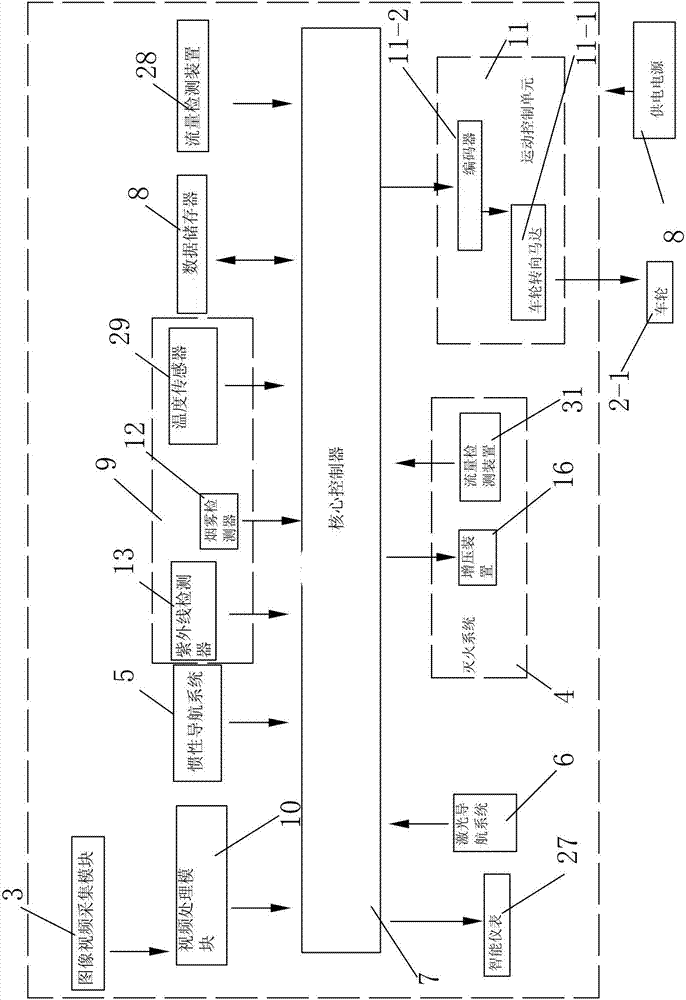
[0047] Such as figure 1 , figure 2 As shown, a fire-fighting robot that moves autonomously and automatically detects and extinguishes fires provided by this embodiment includes a robot body 1 on which a mobile chassis 2 and an image and video acquisition module 3 are arranged. The front and rear of the mobile chassis 2 are , left and right are provided with wheels 2-1 altogether, and described robot body 1 is provided with control system, and described control system comprises fire extinguishing system 4, inertial navigation module 5, laser navigation module 6, core controller 7, data storage module 8. Power supply module 8, sensor unit 9, video processing module 10, motion control unit 11 and smart meter 27, the core controller 7 is respectively connected with the fire extinguishing system 4, inertial navigation module 5, laser navigation module 6, data storage module 8. The sensor unit 9, the video processing module 10 and the motion control unit 11 are connected; the powe...
Embodiment 2
[0080] Such as Figure 7 , Figure 8As shown, the present embodiment provides a fire-fighting robot that moves autonomously and automatically detects and extinguishes fires. In order to improve the working time of the robot, a power detection device 17, a magnetic field induction device 24 and a charging detection device 26 are also connected to the core controller 7. Both the charging detection device 26 and the power detection device 17 are connected to the power supply module 8 , and a charging port 25 connected to the power supply module 8 is connected to the robot body 1 .
[0081] At the same time, this embodiment also discloses a control method for a fire-fighting robot that moves autonomously and automatically detects and extinguishes fires. At the environmental position that needs to be detected in advance, there are more than one automatic charging device 28 evenly distributed, and each automatic charging device is equipped with Magnetic field generator (not represe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More