

Robot self-calibration method based on vision-assisted positioning
An auxiliary positioning and robot technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of low absolute positioning accuracy, complicated measurement process, high cost, etc., to avoid manual teaching measurement, high measurement efficiency and low cost low effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The preferred embodiments of the present invention will be described below in conjunction with the accompanying drawings. It should be understood that the preferred embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
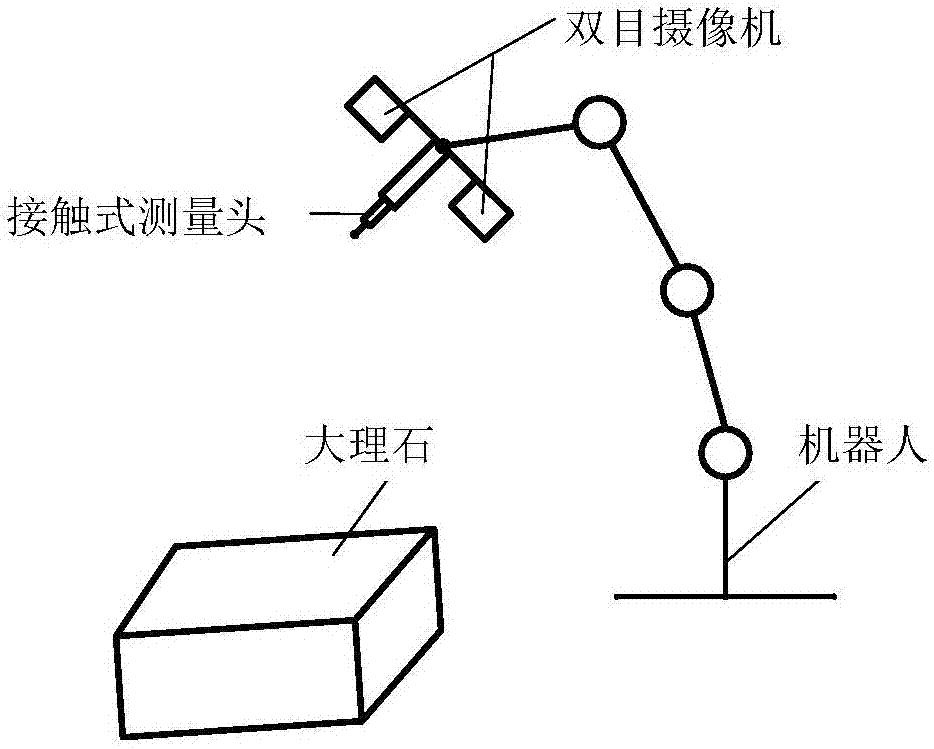
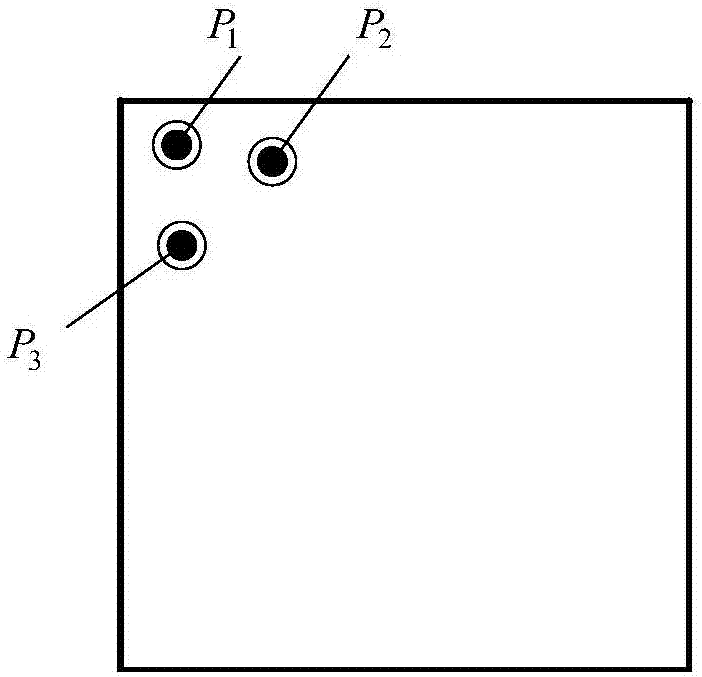
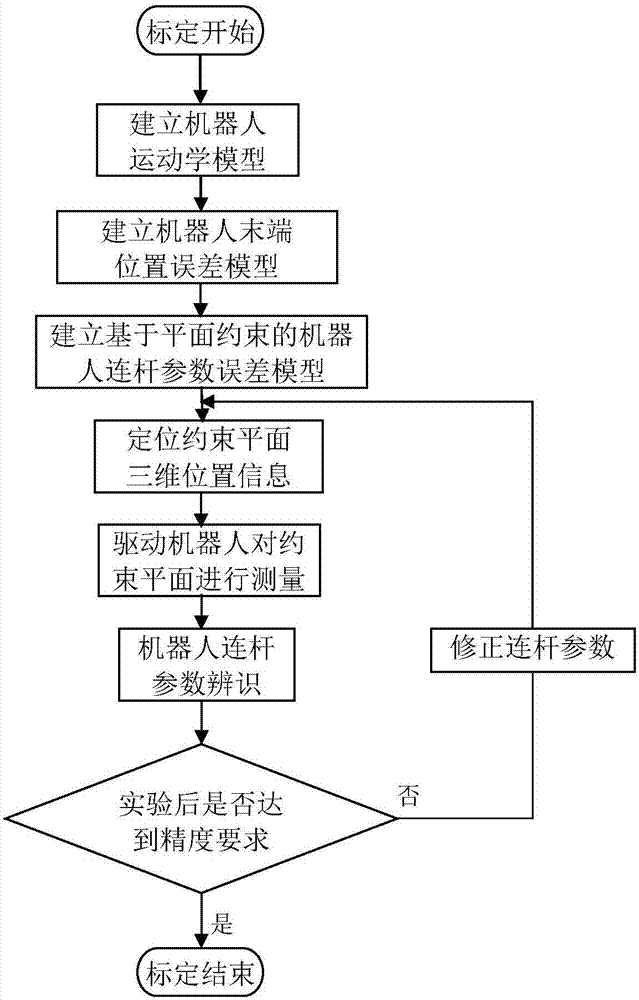
[0044] See attached Figure 1~3 , the robot self-calibration method based on vision-assisted positioning of the present invention comprises the following steps:
[0045] (1) Establish robot kinematics model
[0046] Establish a robot kinematics model combining D-H method and MD-H method, and describe the transformation process from coordinate system i-1 to coordinate system i as A i , A i =f(α i-1 ,a i-1 , d i ,θ i ,β i ), then the pose matrix of the robot end coordinate system n relative to the base coordinate system 0 T n for:
[0047] 0 T n =A 0 ·A 1 ·...·A n
[0048] (2) Establish the robot end position error model
[0049] According to the idea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More