

Target capture point prediction method based on online confidence discrimination
A prediction method and confidence level technology, applied in the fields of image processing and computer vision, can solve the problems that the success rate of capture cannot be effectively improved, the success rate of capture cannot be guaranteed, and the difficulty of capture is increased, so as to meet the requirements of real-time capture and easy Realize the effect of good arrest conditions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
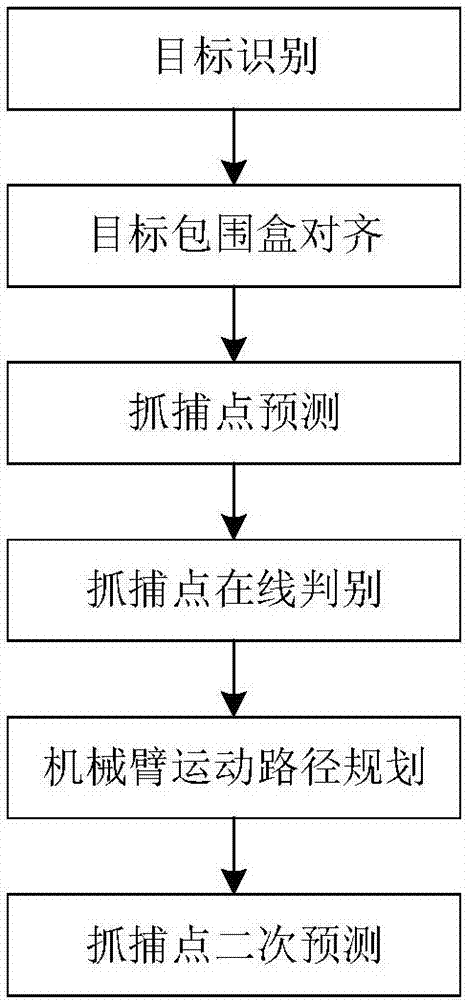
[0037] The present invention is a target capture point prediction method based on online discrimination, which mainly consists of target recognition, target bounding box alignment, capture point prediction, capture point online discrimination, mechanical arm motion path planning and capture point secondary prediction It consists of six parts.
[0038] The method specifically includes steps as follows:
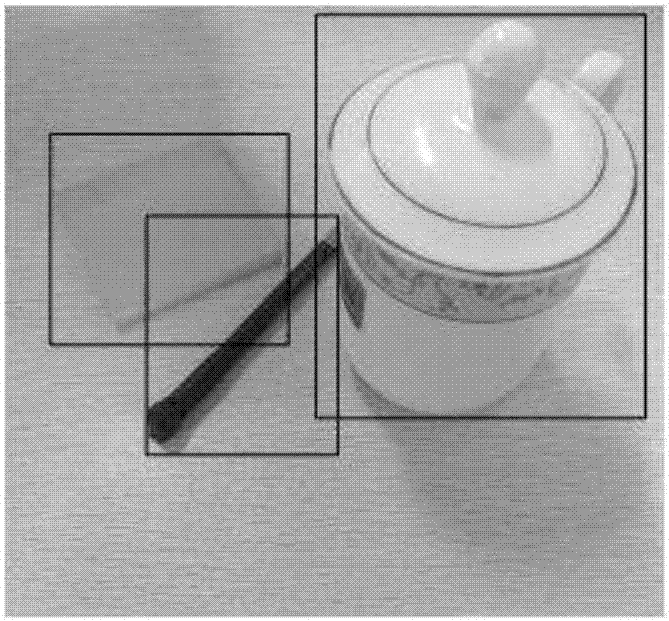
[0039] 1. Target recognition
[0040] In order to avoid the low time efficiency of the traditional algorithm based on sliding window search, a target recognition method based on object-like sampling is adopted. Firstly, the real-time imaging results of the hand-eye camera are extracted. For the current image, the EdgeBoxes method [1] is used to predict all areas that may contain objects in the image.
[0041] [1] C.L.Zitnick and P.Dollár, "Edge boxes: Locating ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More