Bionic joint based on pneumatic muscle serial-parallel connection
A pneumatic muscle and bionic joint technology, applied in the field of bionic robots, can solve problems such as the inability to simulate the distribution state of joints and muscles, and achieve the effects of compact structure, good flexibility, and high power/mass ratio
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
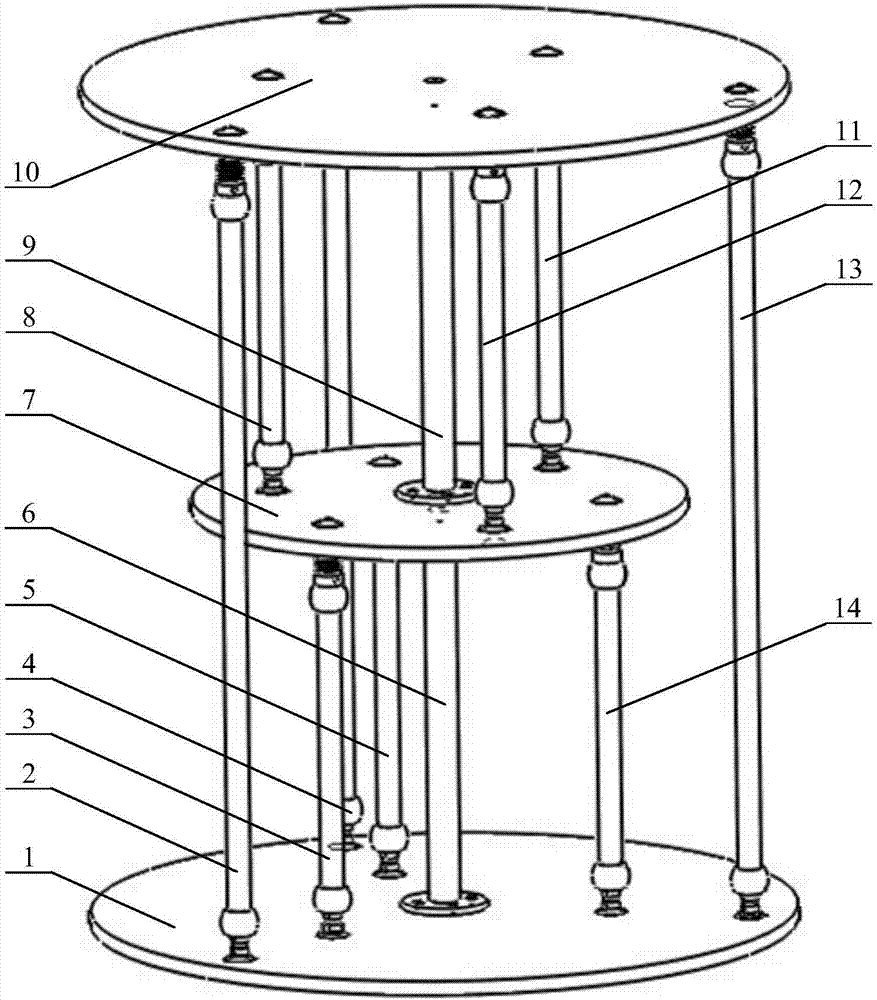
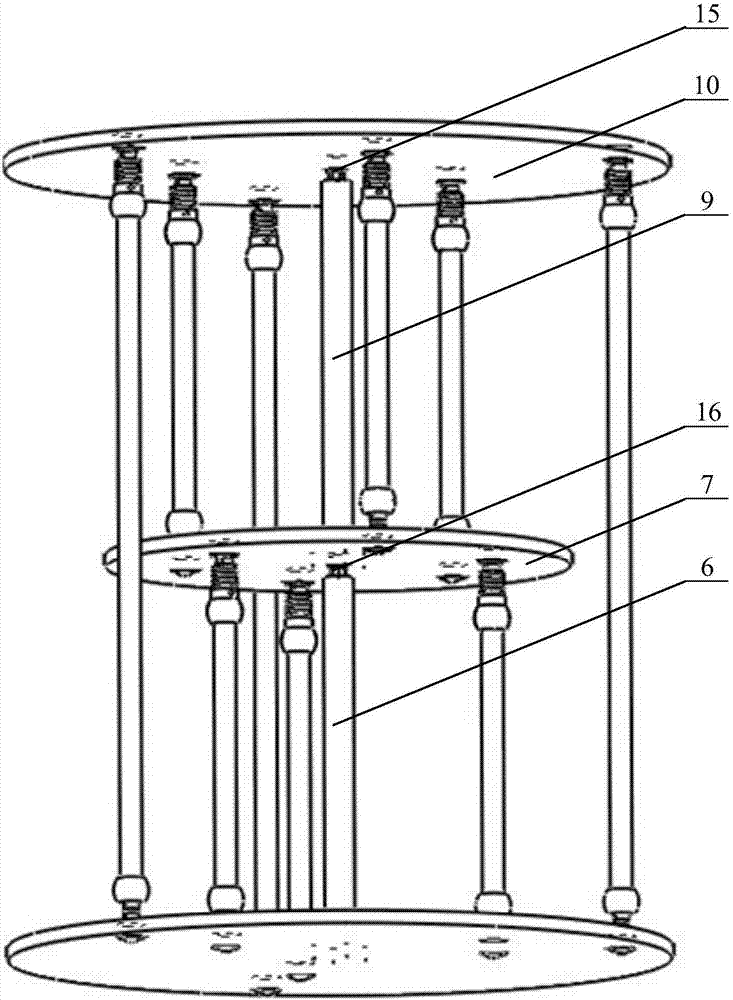
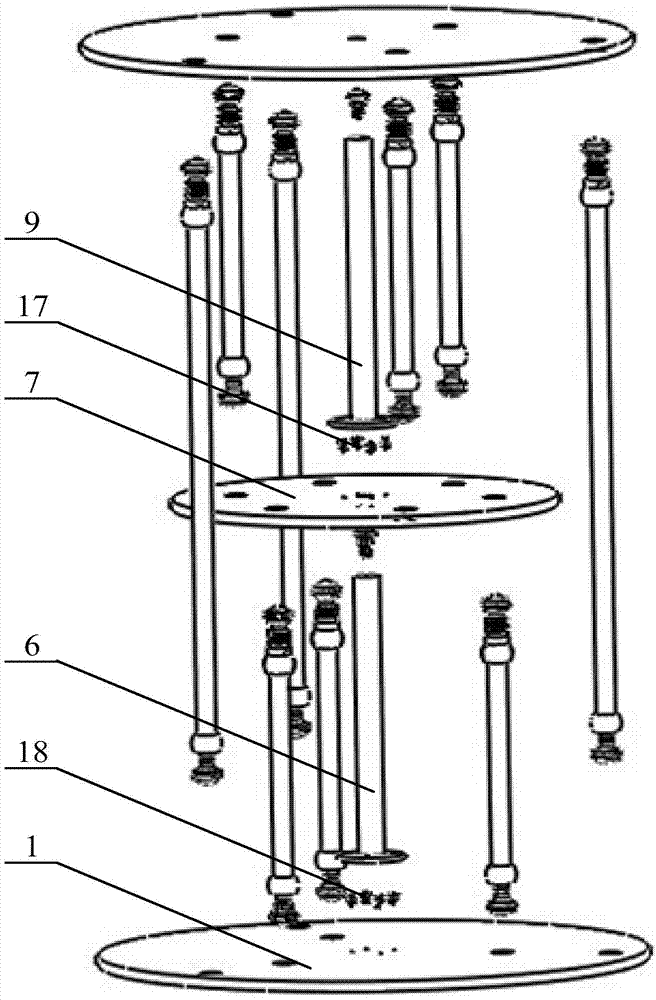
[0027] like figure 1 , 2 , 3, the present invention is based on pneumatic muscle hybrid bionic joint system comprising: base 1, multi-joint pneumatic muscle 1 2, single-joint pneumatic muscle 1 3, multi-joint pneumatic muscle 2 4, single-joint pneumatic muscle 2 5, lower end support Rod 6, middle platform 7, single-joint pneumatic muscle 4 8, upper support rod 9, upper platform 10, single-joint pneumatic muscle 5 11, single-joint pneumatic muscle 6 12, multi-joint pneumatic muscle 3 13, single-joint pneumatic muscle 3 14 , ball hinge 15, ball hinge 2 16, bolt 17, bolt 2 18, muffler 19, muffler tank 20, high-speed switching valve valve group 21, steering gear controller 22, raspberry pie 23, computer 24, data acquisition Card 25, pneumatic triplet 26, pressure holding tank 27, inclination sensor 28, pressure sensor 29.
[0028] Among them, one end of the single-joint pneumatic muscle 3, the single-joint pneumatic muscle 2 5, and the single-joint pneumatic muscle 3 14 are conn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More