

Motion control system of spherical robot having visual feedback and motion control method thereof
A spherical robot and robot motion technology, applied in the field of robotics, can solve the problems of slow motion, many degrees of freedom, complex control, etc., and achieve the effect of accurate attitude information collection and enhanced environmental perception ability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
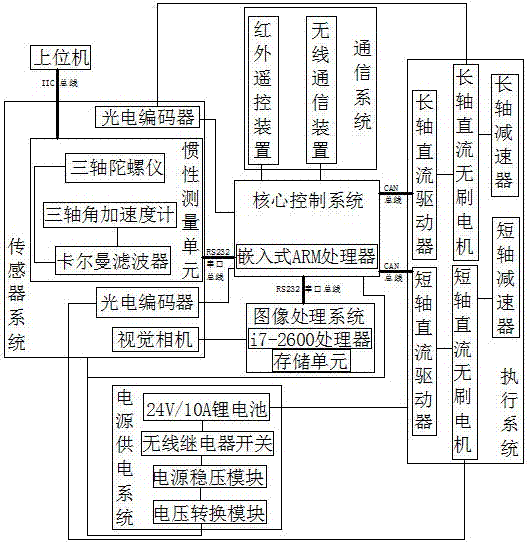
[0032] Such as figure 1 As shown, the spherical robot motion control system with visual feedback of the present invention includes a spherical robot body, a control system installed on the spherical robot body, and a host computer for wireless communication with the control system; the control system includes a core control system. system, and the execution system, sensor system, image processing system and power supply system electrically connected to the core control system, and the communication system with the core control system through wireless transmission; the execution system, sensor system, communication system and image processing system respectively electrically connected to the power supply system;
[0033] The core control system includes an embedded ARM processor, and a peripheral circuit electrically connected to the embedded ARM processor;
[0034] The execution system is composed of a long-axis DC brushless motor, a short-axis DC brushless motor, a long-axis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More