

Humanoid upper limbs based on pneumatic muscles
A pneumatic muscle and upper limb technology, applied in the field of bionic robots, can solve the problems of not being able to simulate the muscles of the upper limbs of the human body, the distribution of the muscles of the upper limbs of the human body, and the distribution of the muscles, etc., and achieve good flexibility, compact structure and high power /quality ratio effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
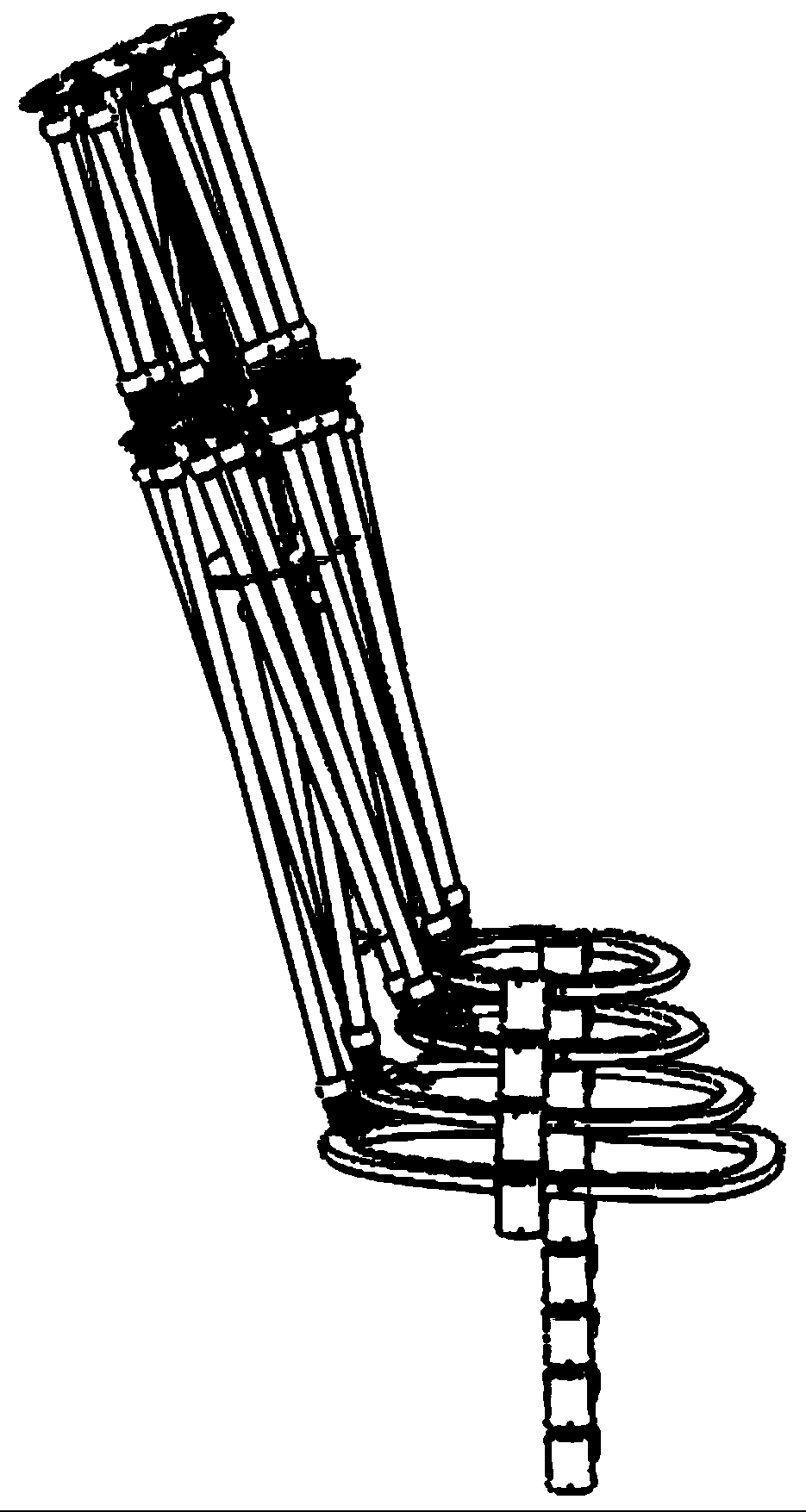
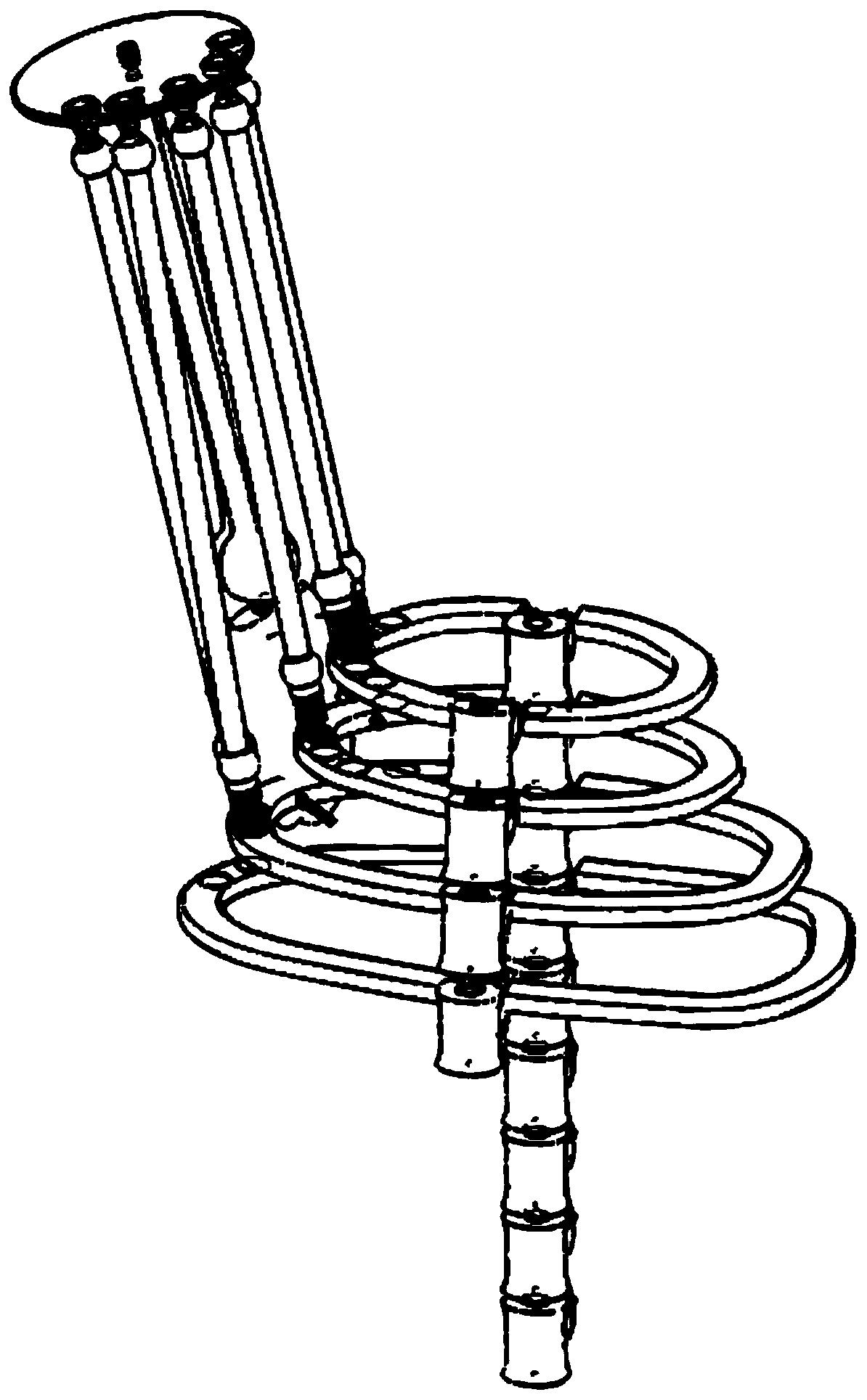
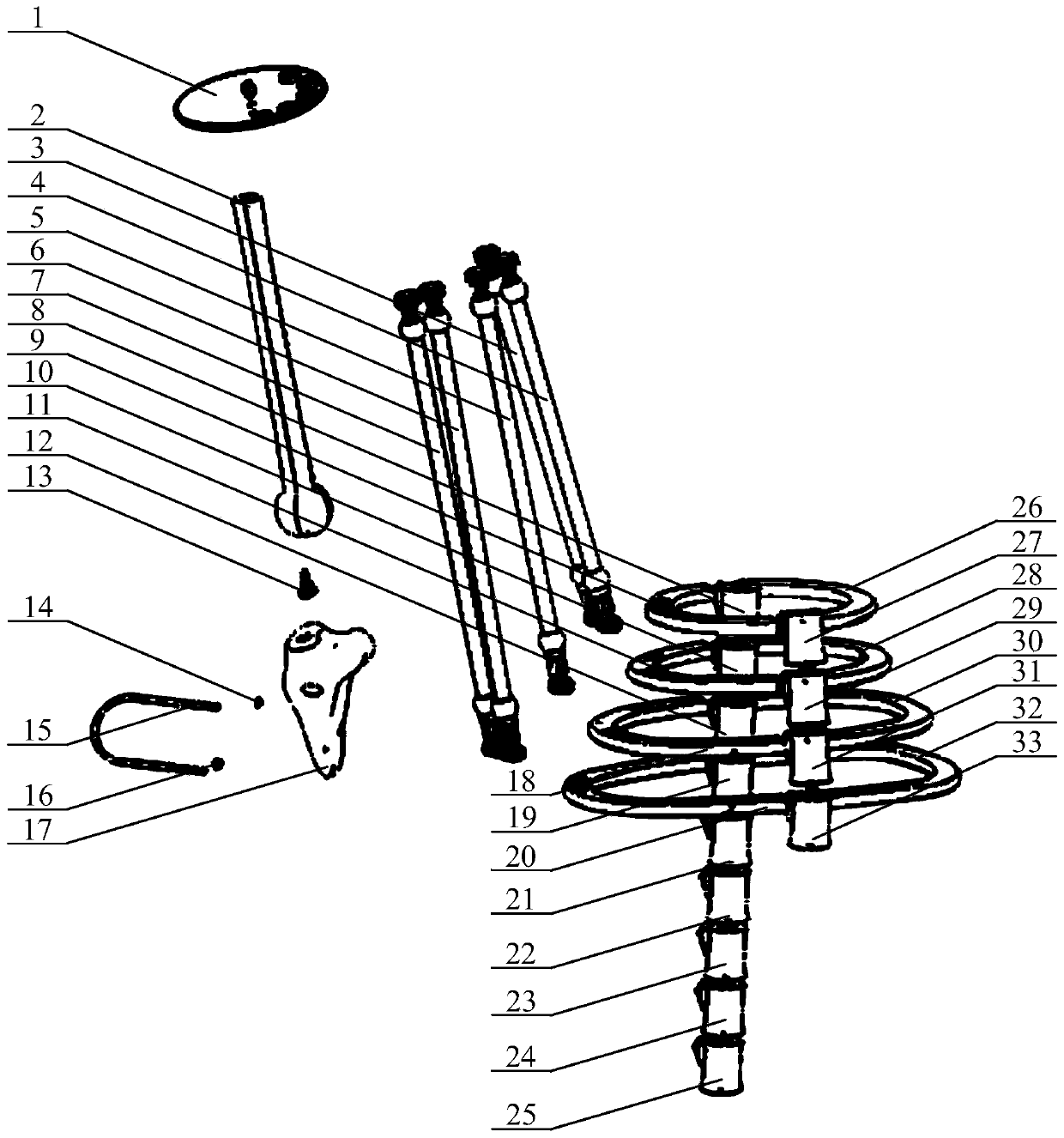
[0036] Such as Figure 1-7 As shown, the human upper limb is simulated based on pneumatic muscles, including: skeletal part, upper limb muscle, arm muscle, forearm muscle and fixed structure;
[0037] Skeletal parts include scapula 17, upper humerus 2, lower humerus 37, upper ulna 35, lower ulna 49, left rib one 9, left rib two 11, left rib three 18, left rib four 20 , right rib one 26, right rib two 28, right rib three 30, right rib four 32, vertebra one 8, vertebra two 10, vertebra three 12, vertebra four 19, vertebra five 21, vertebra six 22, vertebra seven 23, vertebra Eight 24, vertebra nine 25, vertebra ten 27, vertebra eleven 29, vertebra twelve 31, vertebra thirteen 33;
[0038] Upper limb girdle muscles include supraspinatus 3, deltoid 4, subscapularis 5, infraspinatus 6, teres minor 7;
[0039] Arm muscles include brachialis one 38, brachialis two 39, brachialis one 40, brachialis two 41, biceps one 42, biceps two 43, triceps one 44, triceps Two 45, Triceps three ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More