

Video processing-based illumination-adaptive multi-vehicle automatic speed measurement method
A video processing and adaptive technology, applied in the field of multi-vehicle automatic speed measurement, can solve the problems of high installation accuracy and cumbersome calibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0066] Specific implementation mode one: combine figure 1 To describe this embodiment,
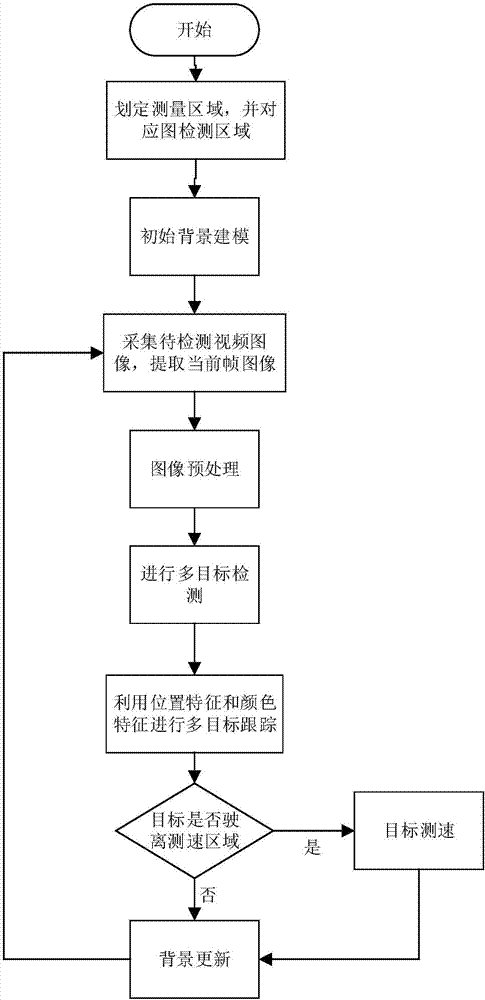
[0067] A multi-vehicle automatic speed measurement method with illumination adaptability based on video processing, comprising the following steps:
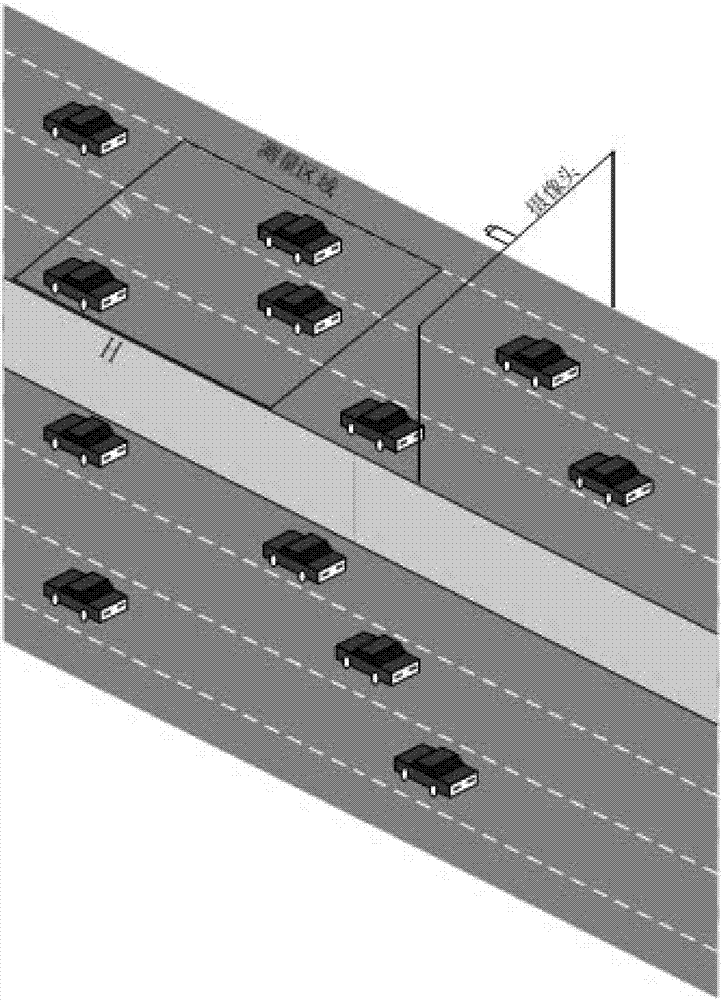
[0068] Step 1. Fix the camera above the one-way lane. On the one-way lane corresponding to the camera, artificially delineate the speed measurement start line, speed measurement end line and the left and right boundary lines of the lane. The area enclosed by the boundary line is defined as the measurement area (W×H), with a width of W meters and a length of H meters, such as figure 2 shown; and the corresponding area of the measurement area (W×H) in the image obtained by the camera is recorded as the image detection area (w×h), with a width of w pixels and a length of h pixels, and the corresponding speed measurement starting point in the image is obtained The line corresponding to the starting line, the line corresponding to the end lin...
specific Embodiment approach 2
[0077] Specific implementation mode two: combination image 3 To describe this embodiment,
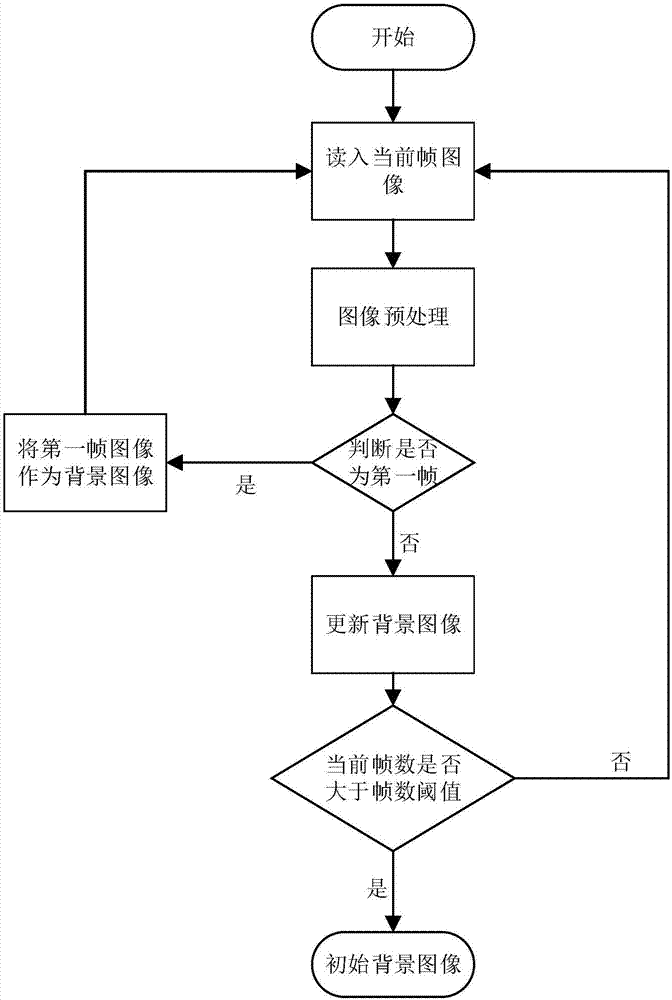
[0078] The process of establishing the initial background image of the captured image described in step 2 of this embodiment includes the following steps:
[0079] For the video image captured by the camera, preprocess the current frame image; then create a background image:
[0080] If the current frame is the first frame of the video image, the first frame image I obtained after preprocessing 1 (i, j) as the first frame background image B 1 (i, j); otherwise, according to the current frame image I obtained after preprocessing current (i, j) and the previous frame background image B of the current frame current-1 (i,j), calculate the background image B of the current frame according to the following formula current (i, j),
[0081] B current (i, j) = αI current (i,j)+(1-α)B current-1 (i,j)
[0082] In the formula, B current (i, j) is the background image of the current fram...
specific Embodiment approach 3
[0086] The process of preprocessing the current frame image described in step 2 of this embodiment includes the following steps:
[0087] If the brightness of the current frame image is higher than the enhanced brightness threshold T brightness , then convert the color image into a grayscale image, and then perform Gaussian smoothing filtering on the obtained grayscale image (generally using a 3*3 rectangular template) to obtain the preprocessed image I current (i, j), where i, j are image pixel coordinates; if the image brightness is lower than or equal to the enhanced brightness threshold T brightnessWhen using the scheme described in "Fast Low-Illumination Image Enhancement Method Based on Improved Dark Channel Prior" (Patent No.: ZL20130325849.1) to enhance the color image, the enhanced color image is obtained, and then the enhanced color image is converted into Grayscale image, and finally Gaussian smoothing filtering is performed on the obtained grayscale image (general...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More