

Structural parameter optimization method for six-degree-of-freedom parallel platform
An optimization method and technology of platform structure, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as the size and dexterity of parallel platforms that cannot be comprehensively considered.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0087] as figure 1 The six-degree-of-freedom parallel platform shown is taken as an example, and the method for optimizing the structural parameters of the six-degree-of-freedom parallel platform of the present invention is described in detail.
[0088] 1. Analysis of working space of parallel platform
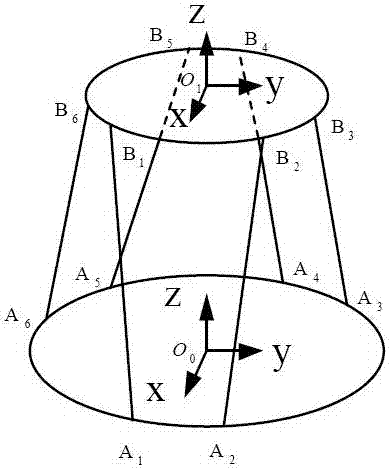
[0089] figure 2 A simplified schematic diagram of the six-degree-of-freedom parallel platform is given. A 1 、A 2 、A 3 、A 4 、A 5 、A 6 Indicates that the hinge point between the moving platform and the variable-length bar is sequentially denoted by B 1 , B 2 , B 3 , B 4 , B 5 , B 6 express. The coordinate system {O 0} and the coordinate system {O 1}. coordinate system {O 0} origin O 0 is the center point of the static platform, its x-axis and y-axis are located in the plane of the static platform, and the line where the x-axis is located passes through the hinge point A 1 and A 2 The midpoint of the connecting line, its z-axis points to the opposite directi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More