

Kalman estimation method of joint torque of SCARA robot
A technology of robot joints and joint torques, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc., and can solve problems that affect the realization of control algorithms and the real-time performance of filtering methods cannot be guaranteed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
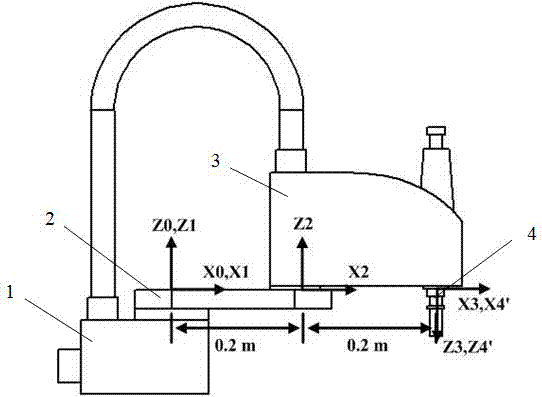
[0060] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
[0061] A kind of Kalman estimation method of SCARA robot joint moment, comprises the following steps:
[0062] Step 1: Establish the dynamic model of the SCARA robot according to the Newton Euler method, and obtain the continuous nonlinear torque expression of each joint;
[0063] Step 2: Transform the continuous nonlinear joint moment expression into a recursive linear discrete joint moment expression by using the first-order Taylor expansion formula of the multivariate function;
[0064] Step 3: Take the linearly discretized expression of each joint torque as the process equation, and add the corresponding measurement equation, and combine the process equation and measurement equation into a discrete-time state-space model of each joint torque;
[0065] Step 4: According to the basic Kalman filter method, combined with the discrete-time stat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More