

Particle swarm optimization method for terrestrial magnetism auxiliary navigation track programming
A technology of particle swarm optimization and track planning, which is applied to ground navigation, navigation, surveying and navigation, etc., and can solve problems such as the inability to maintain navigation accuracy for a long time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] The technical solutions and beneficial effects of the present invention will be described in detail below in conjunction with the accompanying drawings.
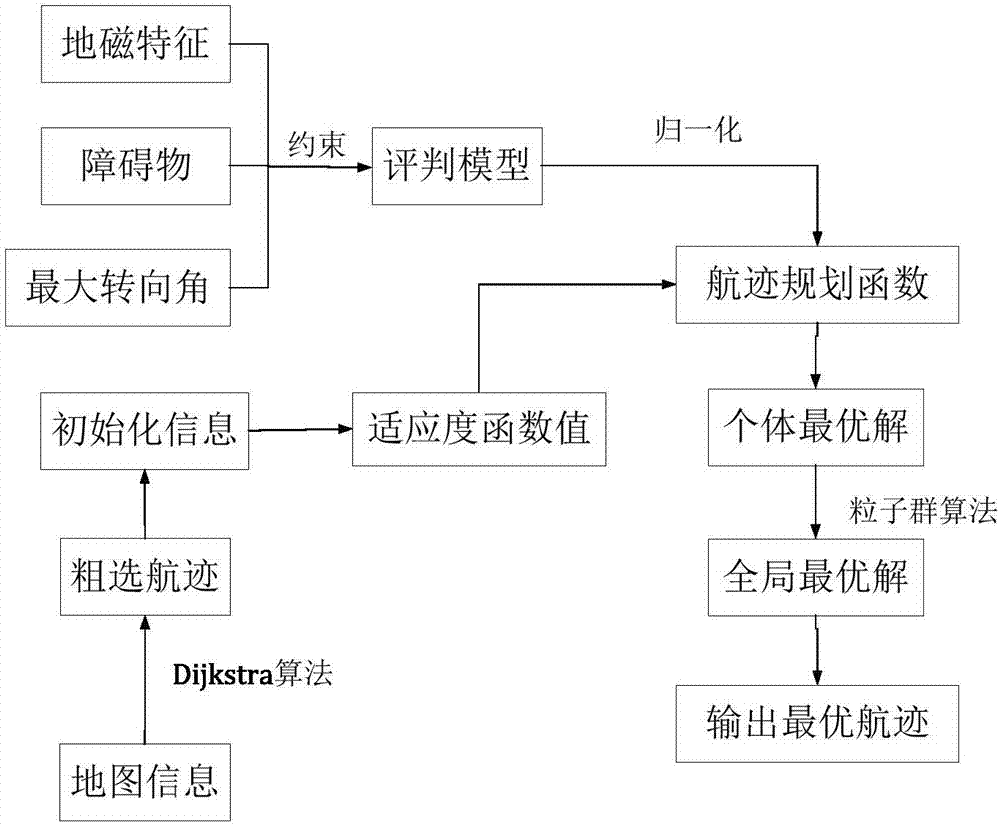
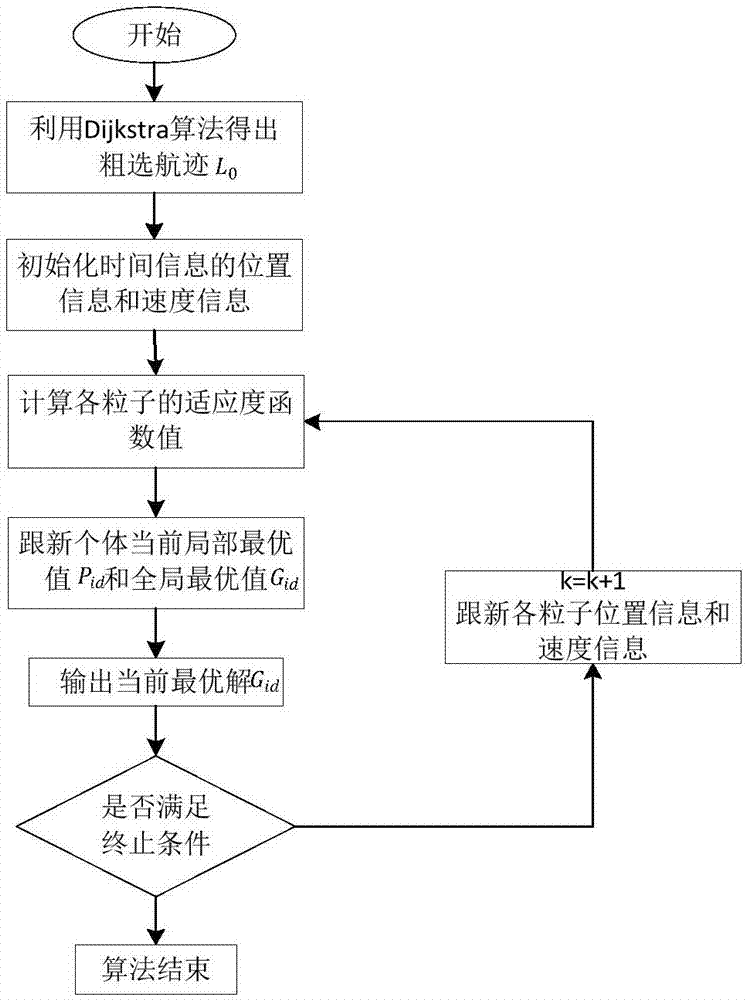
[0064] Such as figure 1 As shown, the present invention provides a particle swarm optimization method suitable for geomagnetic-assisted navigation track planning, comprising the following steps:
[0065] Step 1, considering the constraints of the underwater environment, establish an evaluation model for the path planning of the underwater vehicle;
[0066] Path planning for underwater vehicles has been proven to be an uncertain polynomial problem involving 3D kinematics and dynamics constraints. Considering the influence of geomagnetic map features on the adaptation performance, constraints also need to be made for individual geomagnetic map feature parameters. Underwater environmental constraints include geomagnetic feature constraints, maximum steering angle constraints, obstacle constraints, etc.
[0067] Among ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More