

Method for measuring relative pose of noncooperative target
A non-cooperative target and measurement method technology, applied in the field of relative pose measurement, can solve the problem that visual measurement equipment cannot obtain enough identifiable features, and achieve the effect of improving reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described below with reference to the accompanying drawings and in combination with preferred embodiments.
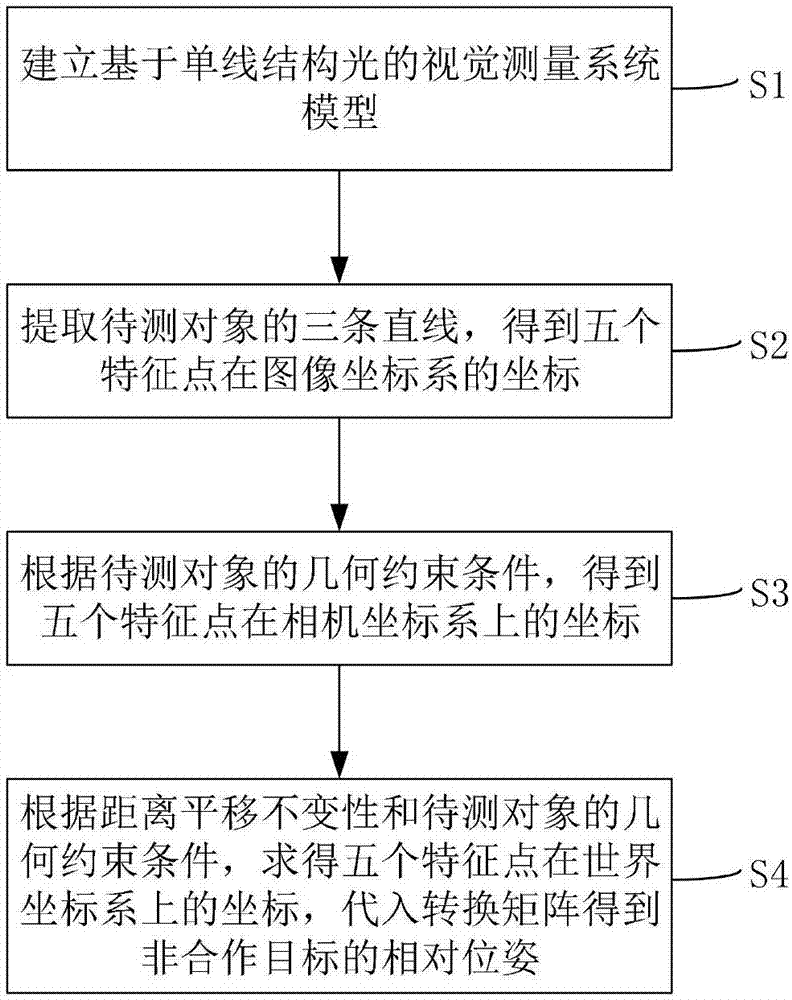
[0024] Such as figure 1 As shown, the preferred embodiment of the present invention discloses a method for measuring the relative pose of a non-cooperative target, comprising the following steps:
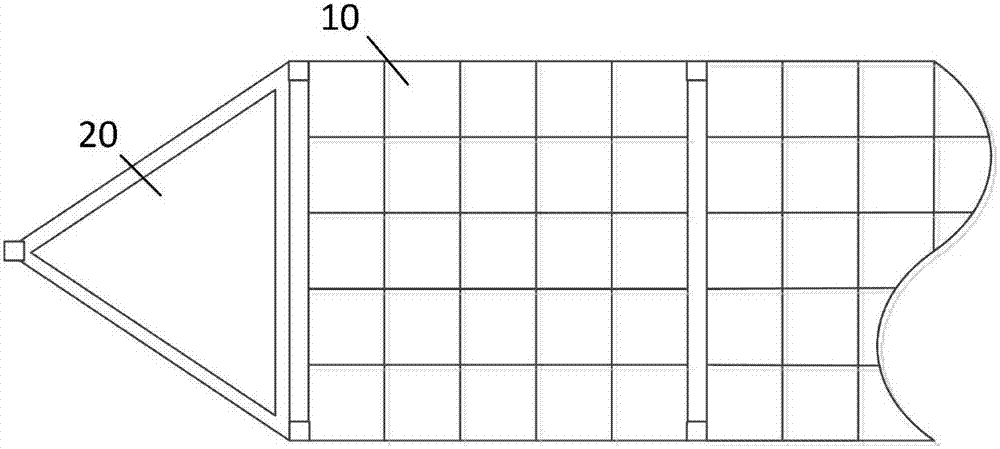
[0025] In the present embodiment, the solar panel triangular support of the space non-cooperative target satellite is selected as the short-distance intersection and approaching target, and the structure of the triangular support 20 of the solar panel 10 in the satellite model is as follows figure 2 As shown, that is to say, in this embodiment, the triangular bracket 20 is used as the non-cooperative object to be measured. The triangular bracket 20 has the feature of an equilateral triangle, and its actual size is unknown.
[0026] S1: Select the object to be measured with equilateral triangle characteristics as a non-cooperative...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More