

Contragradience limited time bilateral remote operation control method and computer readable storage medium
A remote operation control, limited time technology, applied in the field of control, can solve problems such as zero tracking error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
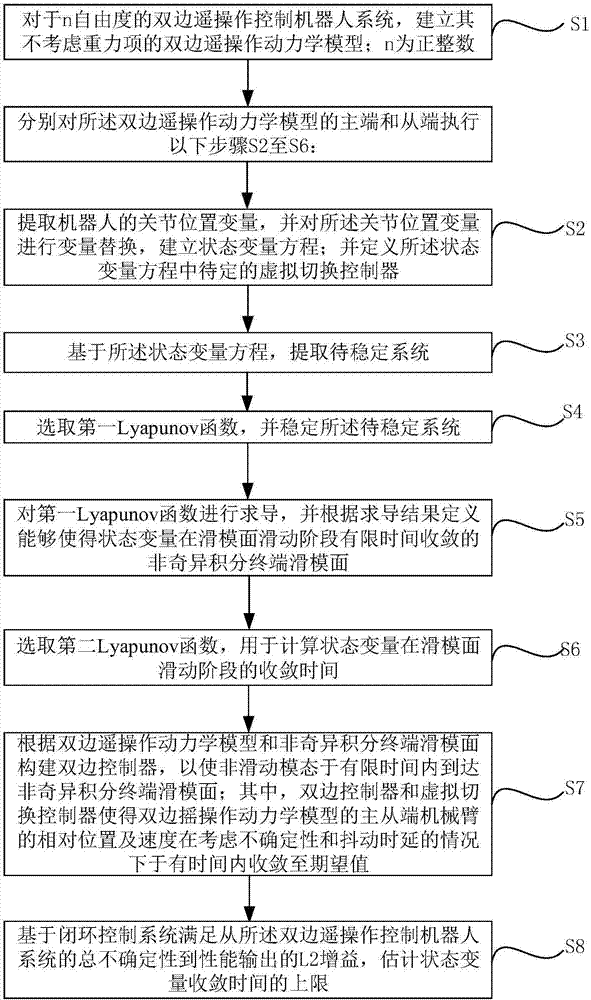
[0026] The present invention will be further described below in conjunction with the accompanying drawings and preferred embodiments.
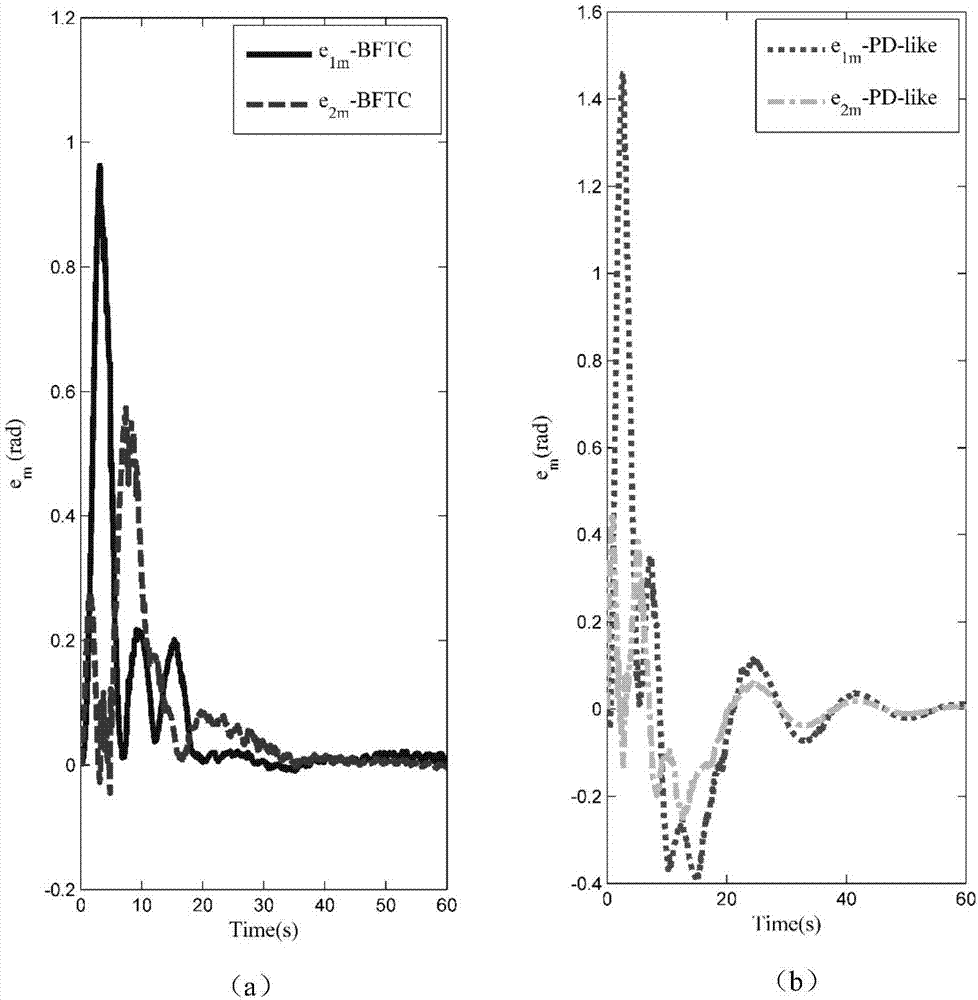
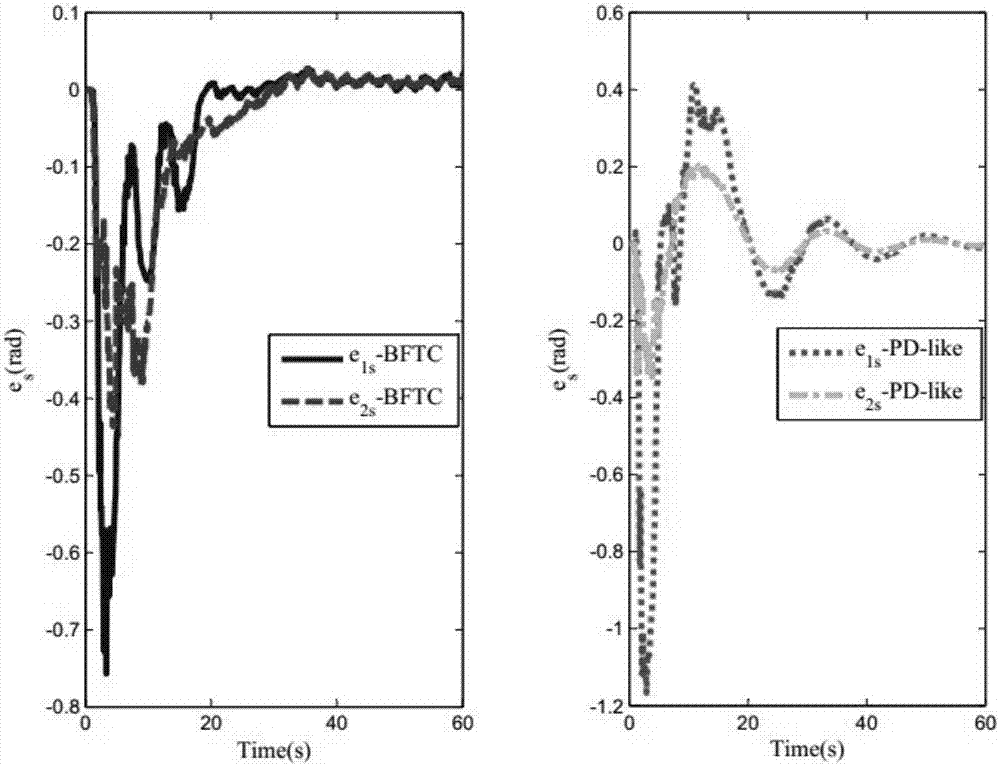
[0027] The specific embodiment of the present invention provides a backstep limited-time bilateral teleoperation control method based on the HJI (Hamilton-Jacobi Inequality) theory. The position and velocity of the arm are changed in coordination with the master manipulator, and the relative position error and velocity error of the master and slave manipulators converge in a finite time, and at the same time, the convergence time is estimated.
[0028] Among them, the HJI theory is described as follows:
[0029] For any given positive real number γ, if there is a positive definite function V, the derivative of V satisfies
[0030]
[0031] Then J≤γ. in, The L2 gain of the robot system is controlled by bilateral teleoperation. The smaller the J value, the stronger the robustness of the system, which represents the interference suppressio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More