

Nurbs curve interpolation method and device
A curve interpolation and curve technology, applied in the field of CNC machine tools, can solve problems such as the inability to achieve high-speed and high-precision machining requirements, and achieve the effect of meeting dynamic requirements, reducing path errors, and ensuring speed accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
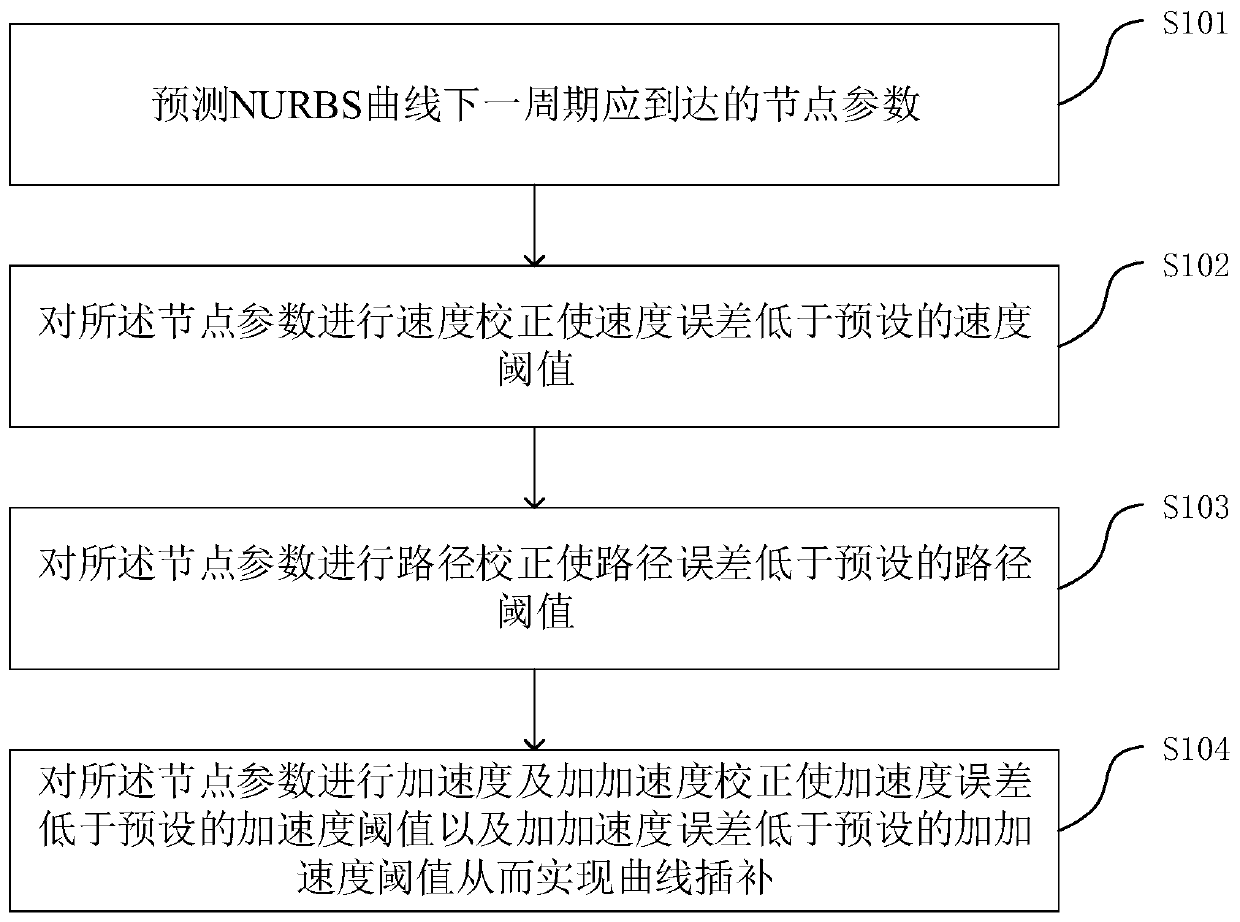
[0062] Such as figure 1 As shown, the embodiment of the present invention provides a NURBS curve interpolation method, including:
[0063] S101. Predict the node parameters that should be reached in the next cycle of the NURBS curve.
[0064] In the interpolation calculation, predict and calculate the spatial position point C(u)=(x(u),y(u),z(u)) that should be reached in the next cycle, and satisfy the speed, acceleration and jerk, path To meet the needs of the error, find the node parameter u corresponding to the interpolation point P(u) i . First predict the next parameter node value u i , and then correct the predicted u with velocity correction, path error correction, acceleration and jerk correction i The value is recalibrated.
[0065] Let the parametric equation of the NURBS curve be:
[0066] C(u)=(x(u),y(u),z(u)), where u∈[0,1]
[0067] According to the Taylor series expansion, we have
[0068]
[0069]
[0070] Forecasting, but considering that the amou...
Embodiment 2
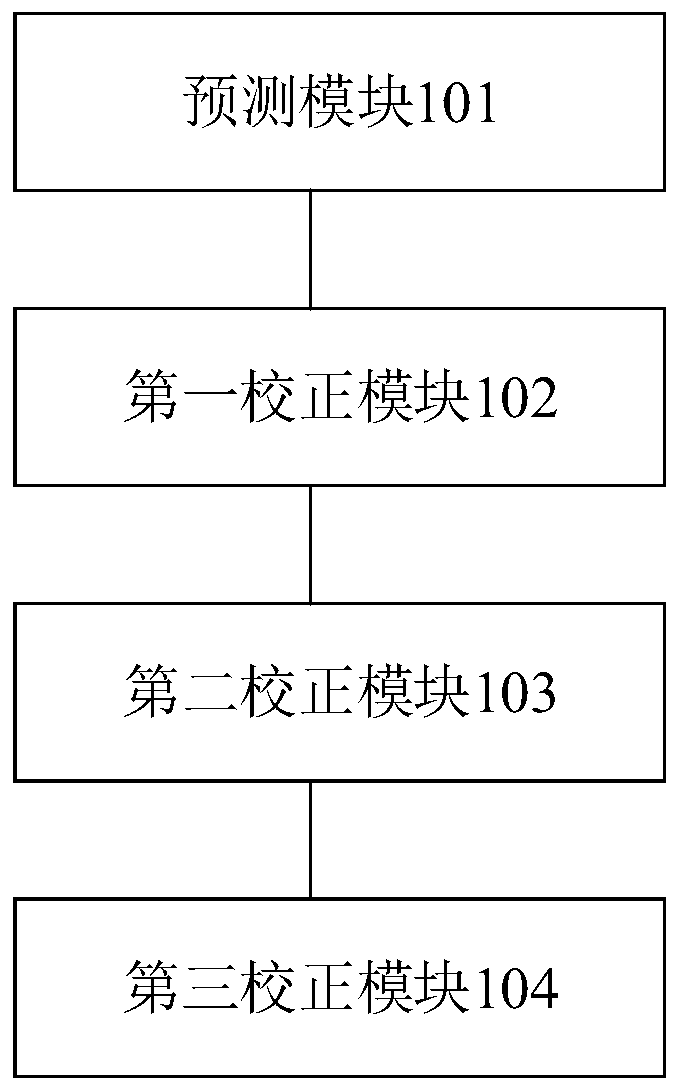
[0098] Such as figure 2 As shown, the embodiment of the present invention provides a NURBS curve interpolation device, including:
[0099] A prediction module 101 , a first correction module 102 , a second correction module 103 and a third correction module 104 .
[0100] The prediction module 101 is used to predict the node parameters that should be reached in the next period of the NURBS curve.
[0101] The first correction module 102 is configured to perform speed correction on the node parameters so that the speed error is lower than a preset speed threshold.
[0102] The second correction module 103 is configured to perform path correction on the node parameters so that the path error is lower than a preset path threshold.
[0103] The third correction module 104 is configured to perform acceleration and jerk correction on the node parameters so that the acceleration error is lower than the preset acceleration threshold and the jerk error is lower than the preset jerk ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More