

Flexible multi-finger mechanical arm for logistics and method for grabbing materials with same
A manipulator and flexible technology, applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of poor grasping, inability to reach, and inability to grasp, etc., and achieve compact structure, efficient and stable grasping, and strong applicability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0048] Such as figure 2 As shown, when the material is grasped without space obstacles, a method of grasping the material with a flexible multi-fingered manipulator for logistics is carried out according to the following steps:
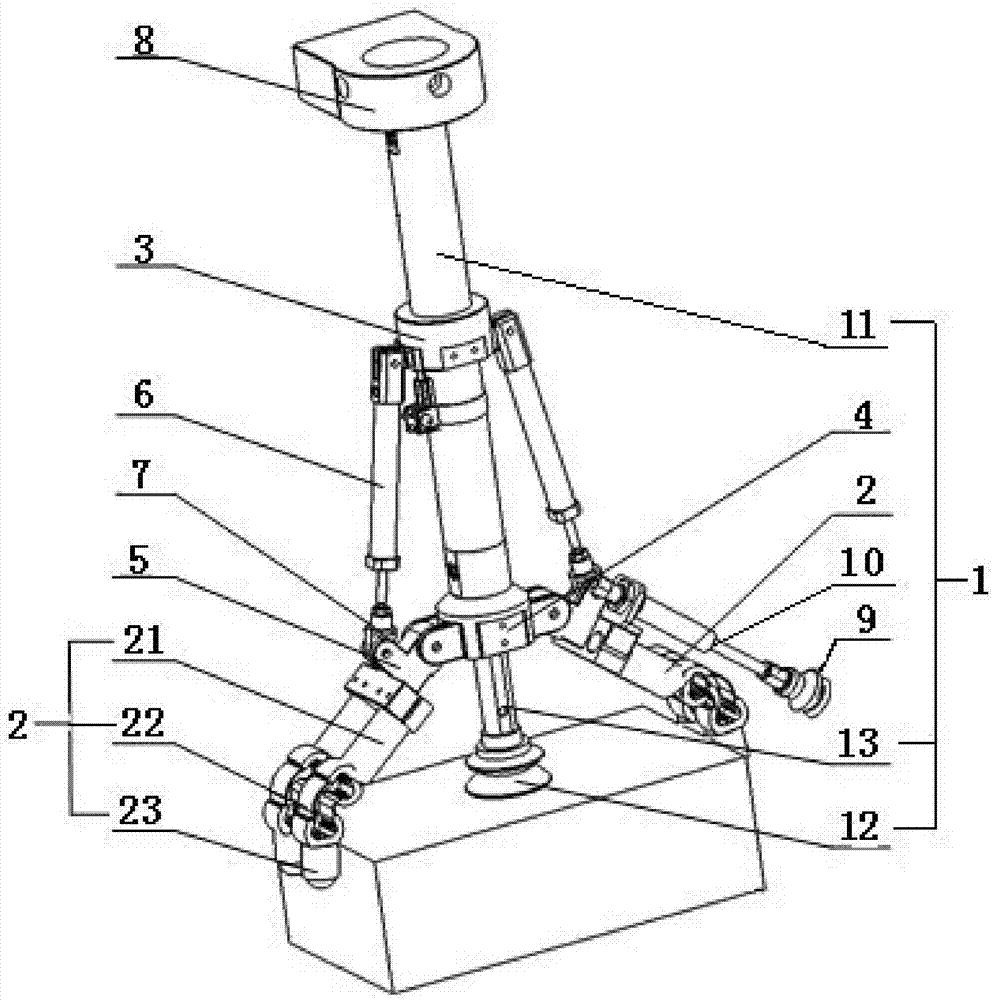
[0049] S1: Control the telescopic end of the main telescopic cylinder 11, extend the main suction cup 12, and suck the material through the main suction cup 12;
[0050] S2: firstly, the telescopic end of the finger-driven cylinder 6 is driven to shrink to make the connecting rod 5 rotate around the joint between the connecting rod 5 and the finger hinge flange, thereby driving the other end of the fingertip 23 away from the main suction cup 12, and realizing the opening of the movable finger 2; Then drive the main telescopic cylinder 11 to drive the material to move axially to the grasping position of the movable finger 2, and finally drive the telescopic end of the finger to drive the cylinder 6 to elongate so that the connecting rod 5 rotates arou...
Embodiment 2
[0053] Such as image 3 As shown, when the material is grasped with space obstacles, a method of grasping the material with a flexible multi-fingered manipulator for logistics is carried out according to the following steps:
[0054] S1: Control the telescopic end of the main telescopic cylinder 11, extend the main suction cup 12, and suck the material through the main suction cup 12;
[0055] S2: After transferring the sucked material to the position where the movable finger 2 can be grasped without space obstacles, the telescopic end of the finger-driven cylinder 6 shrinks to make the connecting rod 5 rotate around the connection between the connecting rod 5 and the finger hinged flange so that Drive the other end of the fingertip 23 away from the main suction cup 12 to realize the opening of the movable finger 2; then drive the main telescopic cylinder 11 to drive the material to move axially to the grasping position of the movable finger 2, and finally drive the telescopic...
Embodiment 3
[0058] Such as Figure 4 As shown, when grabbing small materials, a method of grabbing materials with a flexible multi-finger manipulator for logistics is carried out in the following steps:
[0059] S1: Control the telescopic end of the main telescopic cylinder 11 to shrink and drive the main suction cup 12, and drive the telescopic end of the finger-driven cylinder 6 to elongate so that the connecting rod 5 rotates around the joint between the connecting rod 5 and the finger hinge flange to drive the fingertip 23 The other end is close to the main suction cup 12 to close the movable fingers 2 but not to grab the material, so that the auxiliary telescopic cylinder 10 and the main telescopic cylinder 11 are arranged parallel to each other, and the telescopic end of the auxiliary telescopic cylinder 10 is driven to control the auxiliary small suction cup 9 to approach and absorb. To transfer the material, when the material is transferred to the designated position, by adjusting...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More