

Reliability testing method and device of industrial robot
A technology of industrial robots and test methods, which is applied in the field of industrial robot reliability test methods and devices, can solve problems such as weakened control capabilities, disconnected production processes, and insufficient motion precision of industrial robots, so as to ensure reliability, realize motion accuracy, and realize The effect of effective control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
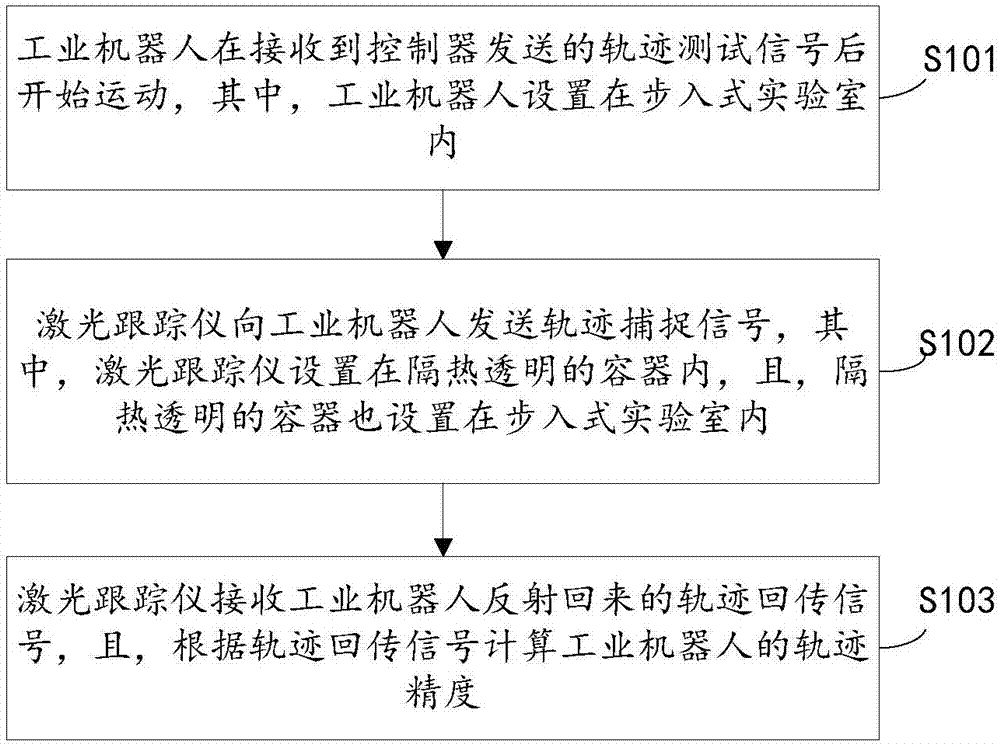
[0053] see figure 1 The industrial robot reliability test method proposed in this embodiment specifically includes the following steps:
[0054] Step S101: The industrial robot starts to move after receiving the trajectory test signal sent by the controller, wherein the industrial robot is set in the walk-in laboratory. What needs to be explained here is that the walk-in laboratory in this method is 250 square meters to ensure that industrial robots have enough space for movement.
[0055] Step S102: The laser tracker sends a trajectory capture signal to the industrial robot, wherein the laser tracker is set in a heat-insulated and transparent container, and the heat-insulated and transparent container is also set in the walk-in laboratory. What needs to be explained here is that usually, the heat-insulating transparent container is a heat-insulating glass hut, and the temperature inside the heat-insulating glass hut is kept constant, and the shape and volume of the heat-insu...
Embodiment 2
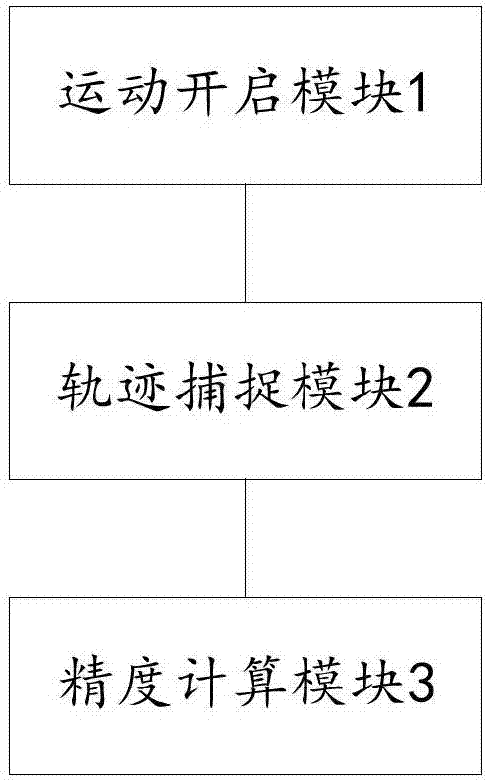
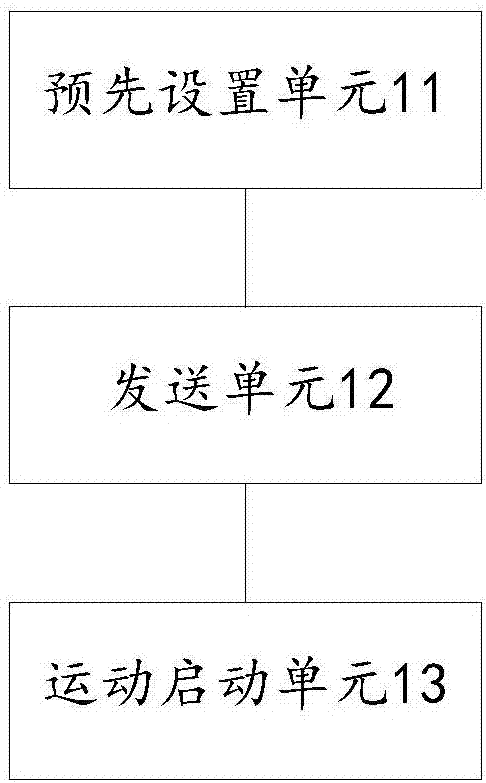
[0071] see figure 2 , image 3 and Figure 4 , the present embodiment provides an industrial robot reliability test device comprising: a sequentially connected motion opening module 1, a trajectory capture module 2 and an accuracy calculation module 3. After the trajectory test signal starts to move, wherein the industrial robot is set in the walk-in laboratory, the trajectory capture module 2 is used for the laser tracker to send the trajectory capture signal to the industrial robot, wherein the laser tracker is set in a heat-insulating transparent container , and the heat-insulated transparent container is also set in the walk-in laboratory, and the accuracy calculation module 3 is used for the laser tracker to receive the trajectory return signal reflected by the industrial robot, and calculate the trajectory of the industrial robot according to the trajectory return signal precision.
[0072] Wherein, the motion opening module 1 includes: a preset unit 11 is used for t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More