A two-wheel self-balancing robot
A robot, self-balancing technology, applied in the field of robots, can solve the problems of limited driving, complicated operation, easy to fall off, etc., to achieve the effect of eliminating auxiliary operation, reducing impact, and reasonable design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
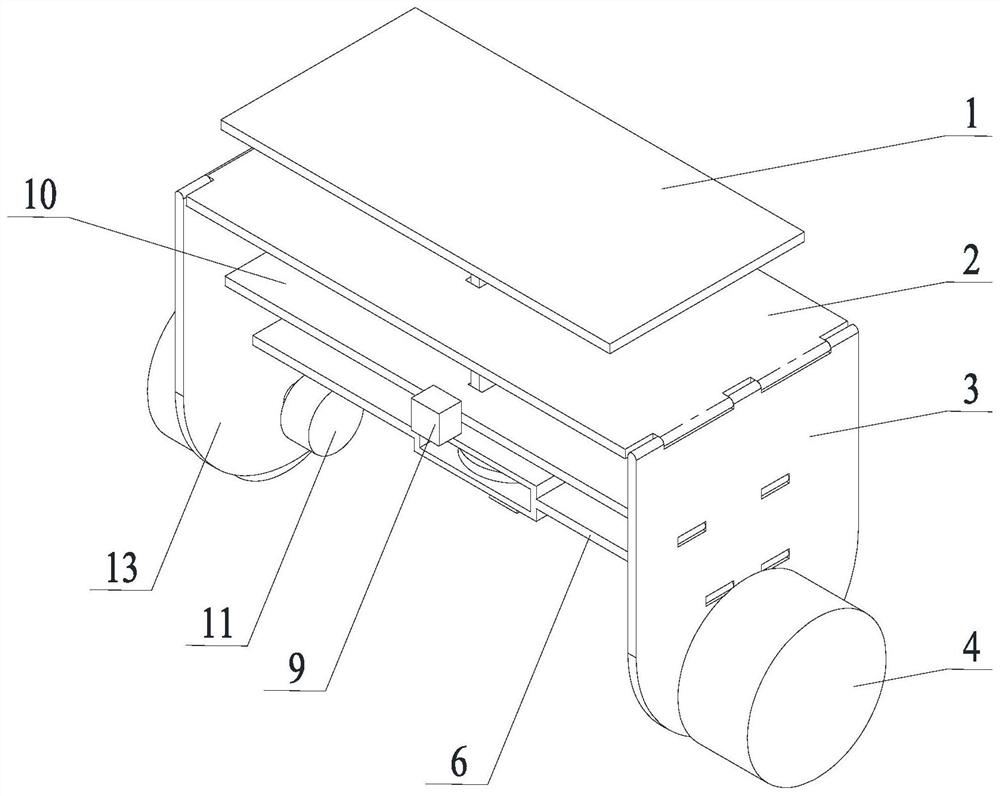
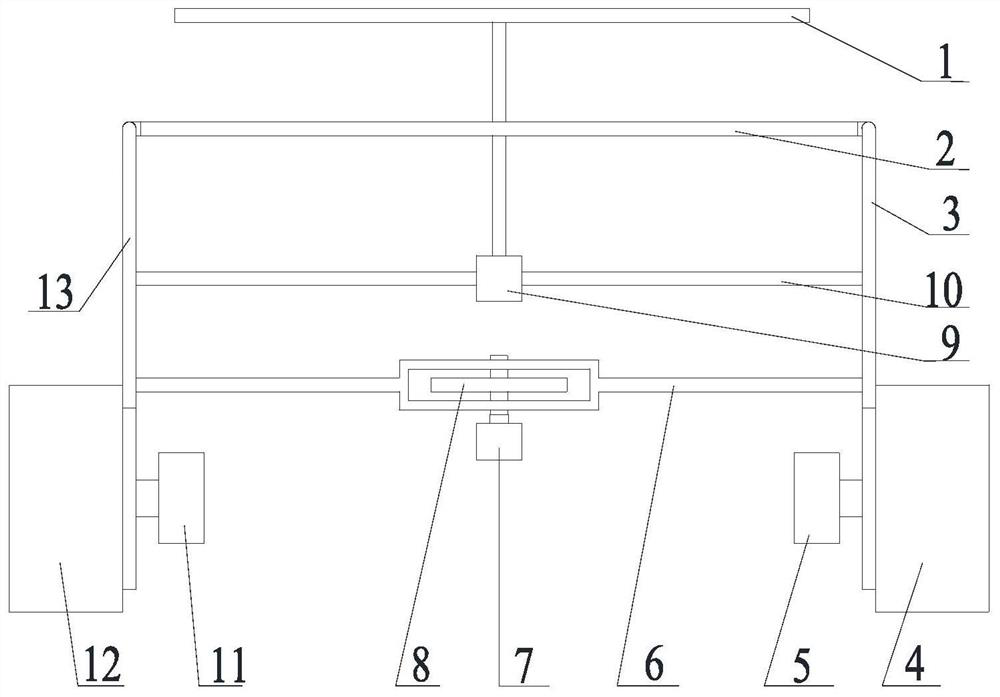
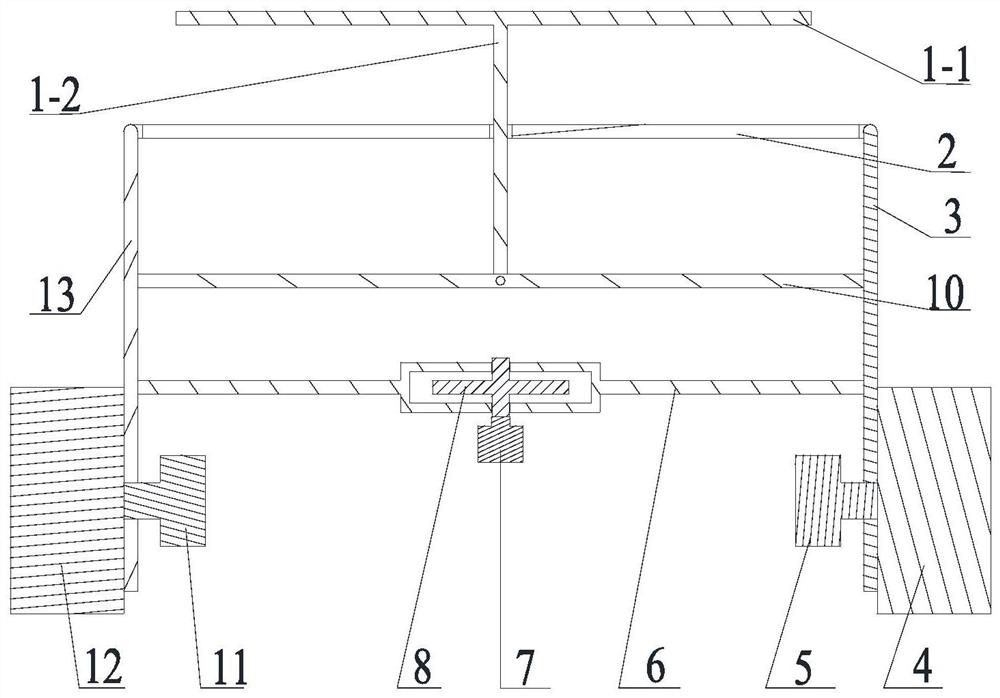
[0034] Such as figure 1 , figure 2 , image 3 Shown is embodiment 1 of the present invention, in this embodiment, the present invention provides a kind of two-wheeled self-balancing robot, comprises vehicle body, and wheels are installed on both sides of vehicle body, and vehicle body comprises parallelogram frame body, is used for vehicle body The oblique deformation of the car body is equipped with a loading platform 1, the loading platform 1 is hinged with the parallelogram frame body, the first motor 9 is installed in the parallelogram frame body, and the first motor 9 drives the parallelogram frame body according to the road conditions. The oblique deformation makes the stage 1 always remain horizontal.
[0035] According to the embodiment of the present disclosure, the parallelogram frame can be tilted to the left or right according to the height of the road surface, such as Figure 5 As shown, the road surface is low on the left and high on the right, and the right ...
Embodiment 2
[0056] In this embodiment, the difference from Embodiment 1 is that the upper panel 2, the middle panel 10, the left side panel 13, the right side panel 3, and the flywheel support plate 6 can all adopt hollow-out plate bodies or rod structures. , which is beneficial to reduce the weight of the robot.
[0057] Other structures of the two-wheel self-balancing robot in this embodiment are the same as those in Embodiment 1, and will not be described again here.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com