

Wall-climbing robot
A technology of a wall-climbing robot and a leg mechanism, which is applied in the field of wall-climbing robots, can solve problems such as unoptimistic reliability, low work efficiency, and potential safety hazards, and achieve the effects of remarkable load and obstacle-crossing ability, simple control, and flexible walking.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The foregoing summary will be described more particularly hereinafter with reference to specific embodiments of the invention that are illustrated in the accompanying drawings.
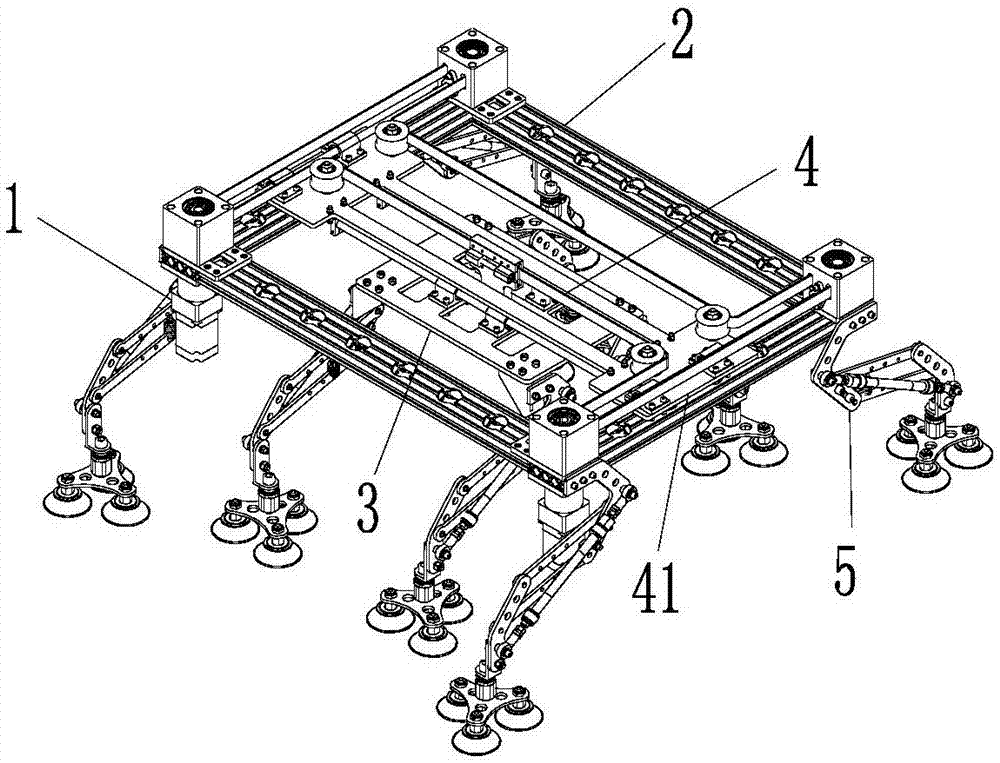
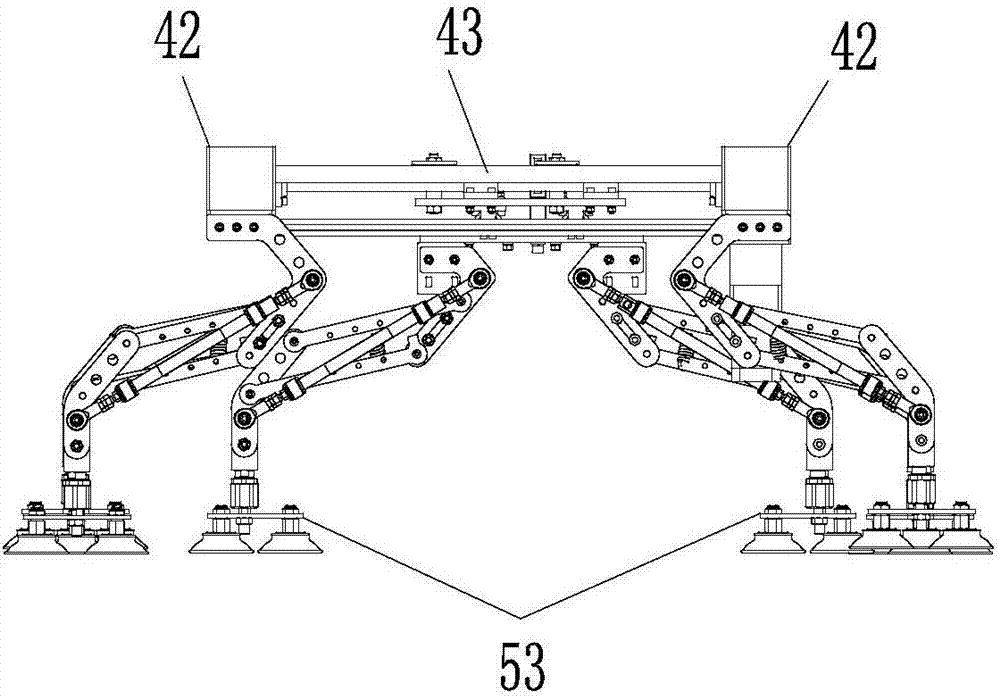
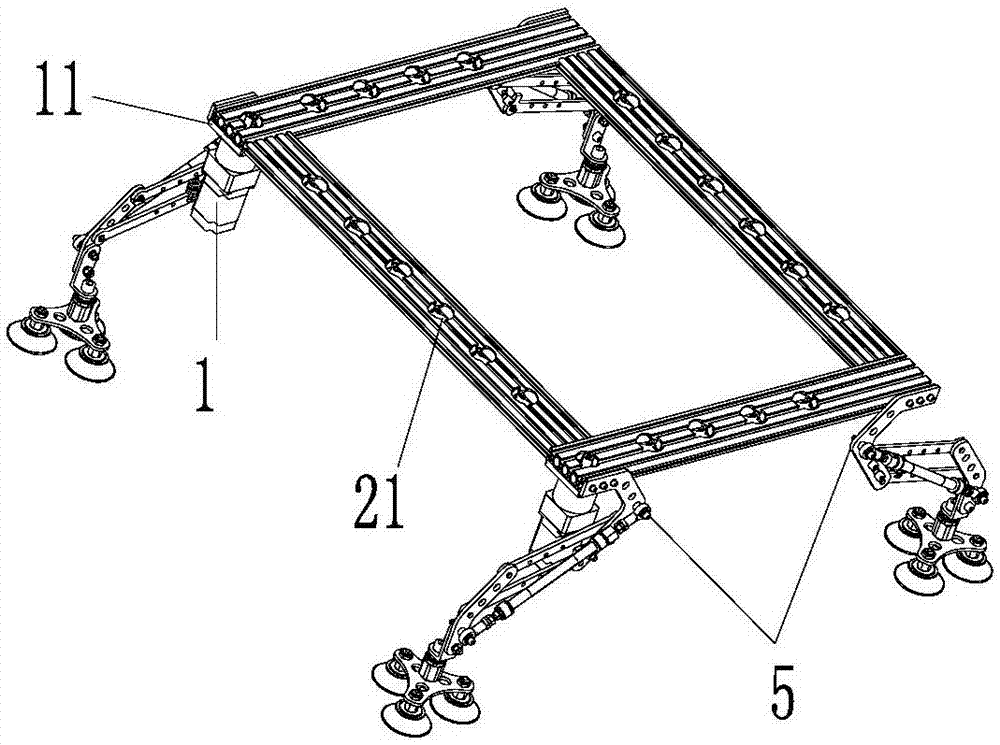
[0024] Such as figure 1 and figure 2 The wall-climbing robot shown is mainly composed of a motor 1, an outer frame 2, an inner frame 3, a parallel movement mechanism 4 capable of moving in the XY plane, and a leg mechanism 5 capable of lifting legs in the Z direction. The motor 1 It mainly provides power for the wall-climbing robot. In this embodiment, at least one motor 1 is provided, and there may be multiple motors. There are four leg mechanisms 5 that can be adsorbed on the wall. In this embodiment, the outer frame 2 can also carry equipment with corresponding functions. Preferably, if image 3 , Figure 4 As shown, the inner frame 3 includes an inner frame template 31 and a die-casting corner connector 32, and the leg mechanism 5 on the inner frame 3 is fixed on the inner frame templ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More