

Heterogeneous unmanned aerial vehicle cooperative task assignment method taking time window into account
A technique of time windowing and task assignment, applied in non-electric variable control, instrumentation, control/regulation systems, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
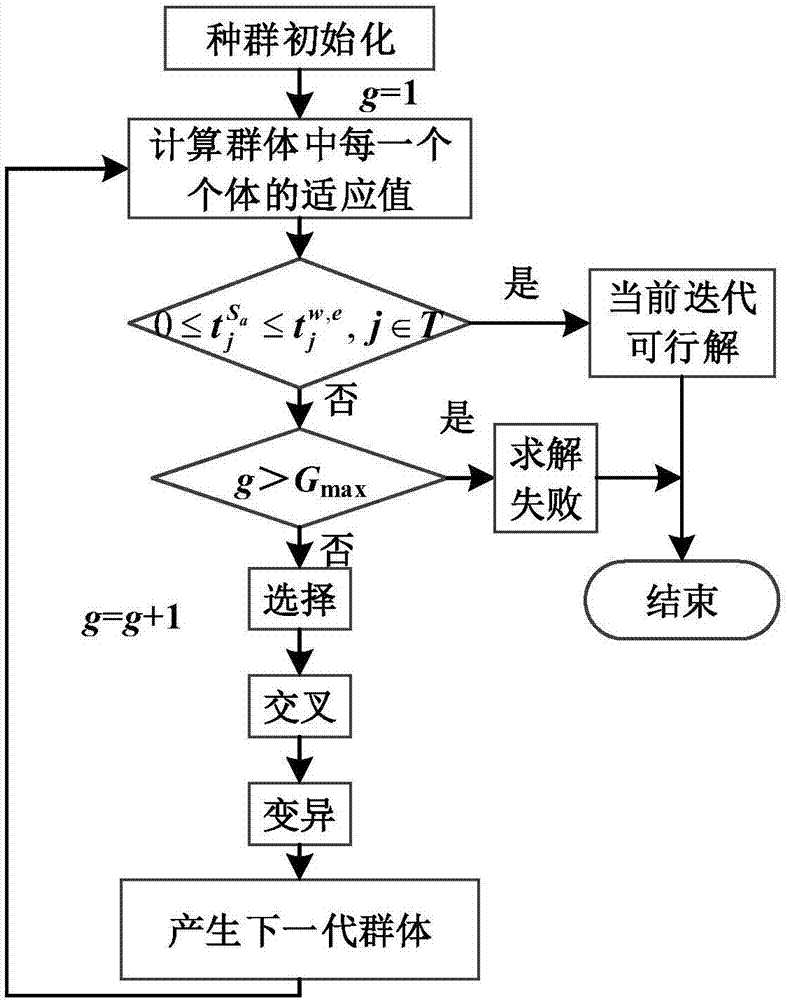
[0083]In order to verify the effectiveness of the proposed method, the penalty function-based genetic algorithm (PF-GA) and the random search method (RSM) disclosed in the embodiment are respectively used to solve the heterogeneous UAV coordination algorithm considering the time window in the modern weapon mission planning system. task assignment problem. The simulation hardware is Intel Core i5-2310CPU 3.10GHz 4G memory, and the simulation environment is MATLAB. In each iteration of PF-GA, 66% of offspring are generated by crossover, 32% of offspring are generated by overall mutation, and the remaining 2% are used to retain the best individual in the parent generation. In addition, RSM randomly generates nfe chromosomes that meet the constraints according to the number of model calls nfe, and selects the optimal individual as the result output.
[0084] Two different scenarios are used to illustrate the feasibility and algorithm effectiveness of a heterogeneous UAV cooperati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More