

Unmanned plane image geometric processing method giving consideration to precision and speed
A processing method, UAV technology, applied in the geometric processing of UAV images, taking into account the accuracy and speed of UAV image geometry processing field, can solve the problem of slow speed, to reduce time-consuming, ensure accuracy, with geographic The effect of coordinates
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The following is a further description of the technical solution of a UAV image geometry processing method with both accuracy and speed in combination with the accompanying drawings, so that those skilled in the art can better understand the present invention and implement it.
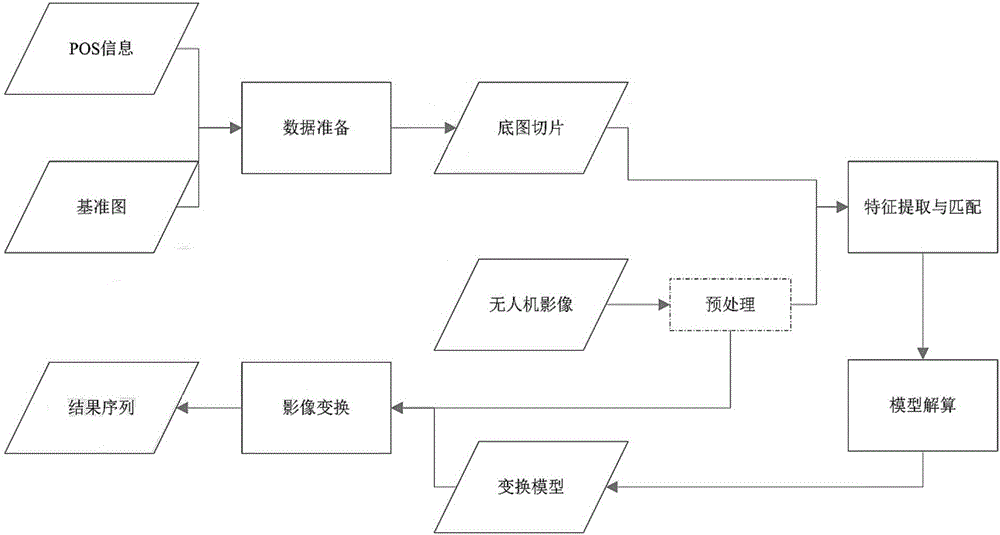
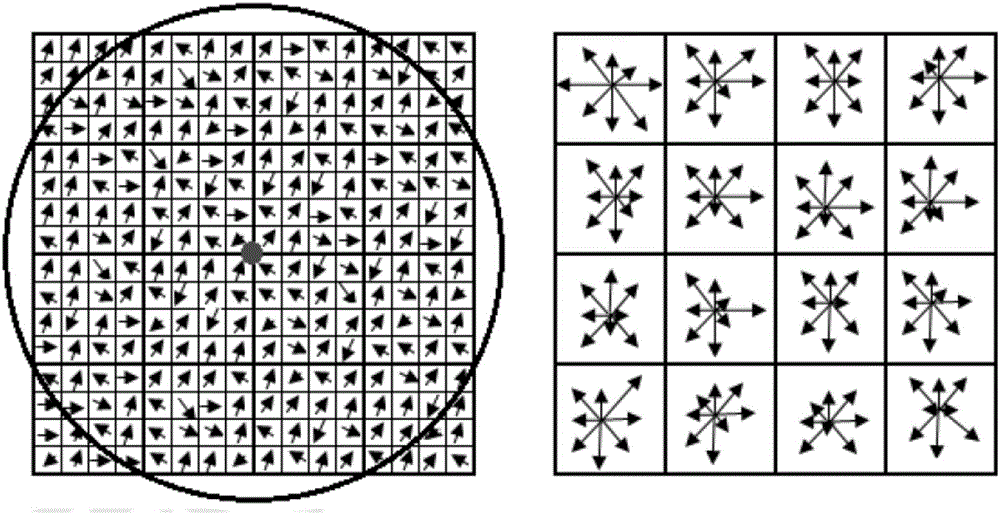
[0045] see Figure 1 to Figure 2 , a UAV image geometry processing method that takes into account both accuracy and speed provided by the present invention, adopts a method based on historical reference map matching, the method goes through: data preprocessing, data preparation (coverage estimation and historical reference map slicing), feature Extraction and matching, RANSAC error removal, model solution. The key links involved are: UAV image ground coverage estimation, SIFT feature extraction and matching, RANSAC gross error elimination, model solution and image resampling. The specific process of the model solution is to use the matching results to establish a fitting polynomial or a triangu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More