A Less Conservative Trajectory Tracking Control Method for Permanent Magnet Spherical Motor
A spherical motor and trajectory tracking technology, which is applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of bloated structure, larger controller size, limitations, etc., and achieve less conservatism and good robustness performance, good anti-disturbance ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
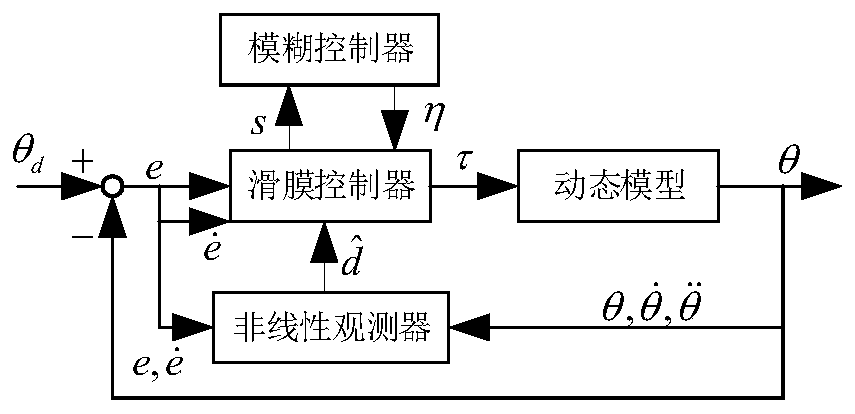
[0038] figure 1 Shown is the block diagram of the permanent magnet spherical motor fuzzy sliding mode control system based on nonlinear disturbance observer, including nonlinear observer, sliding mode controller, and three fuzzy controllers. The observed value of the nonlinear observer is used as the input of the sliding mode controller, and the output gains of the three fuzzy controllers are respectively used to replace the switching control gains of the three axes in the sliding mode control.
[0039] The dynamic model of permanent magnet spherical motor is:
[0040]
[0041] In the formula, θ=[αβγ]T represents the generalized displacement, M(θ) is the inertia matrix, is the matrix of centrifugal force and Coriolis force, d is the compound disturbance such as uncertainty, friction, external disturbance, load disturbance, etc., τ is the control torque matrix of the rotor in three axes.
[0042] M(θ), The expression is as follows:
[0043]
[0044]
[0045] Desi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



