

Experimental training device and application for multi-gesture stretching and grabbing movement in three-dimensional space
A three-dimensional space, training device technology, applied in the field of bioengineering, can solve the problems of consuming human resources, unable to obtain continuous motion data of arm movement trajectory, prone to judgment errors, etc., to achieve the effect of improving training efficiency and reducing manual participation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
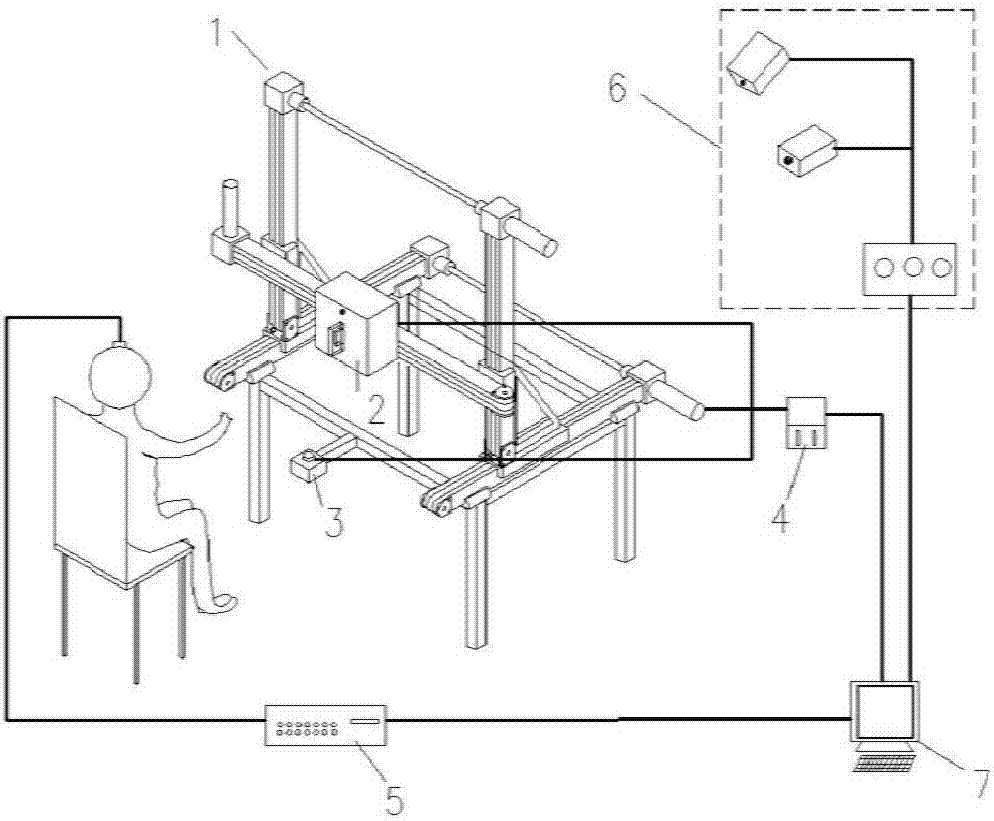
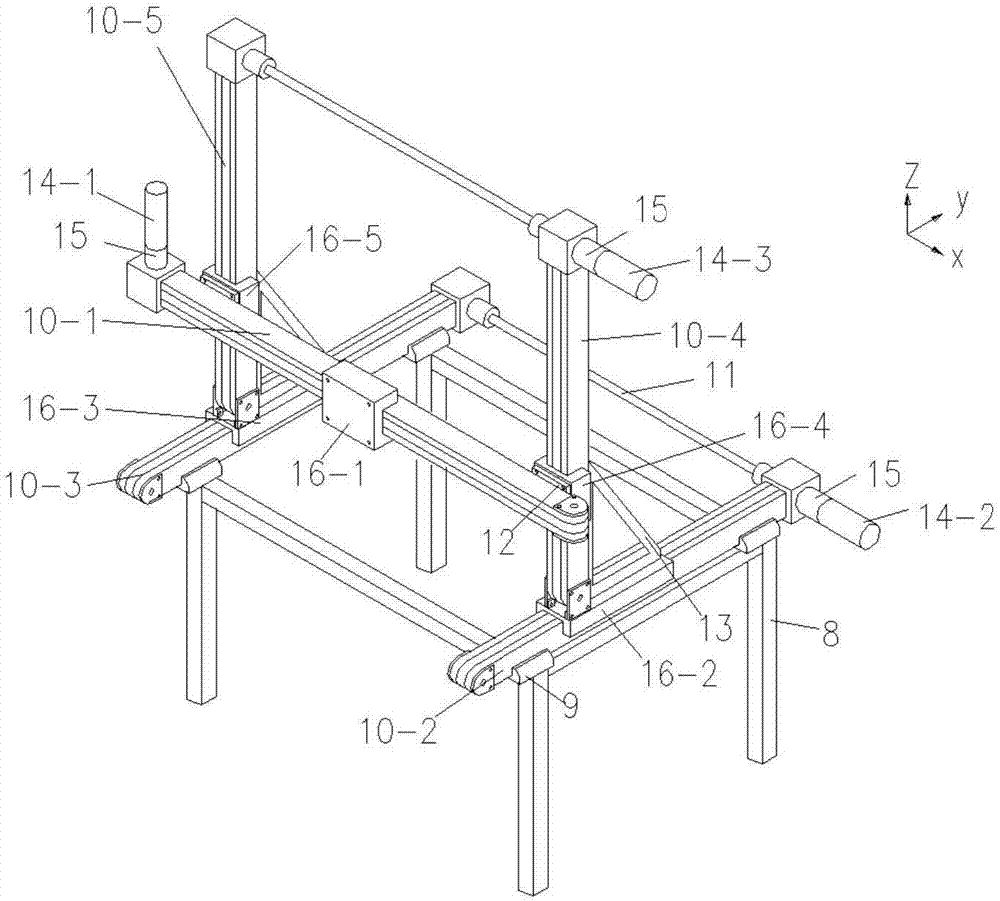
[0037] see figure 1 , an experimental device for guiding multi-gesture stretching and grasping motions in three-dimensional space according to the present invention mainly includes a three-dimensional electric slide table 1, a grasping object assembly 2, a button switch 3, a data acquisition card 4, and an EEG signal recording system 5 , an optical motion capture system 6 and a PC 7. The three-dimensional electric slide table 1 is an XYZ three-axis slide rail 10 driven by a motor 14. The main structure of the three-dimensional electric slide table 1 is composed of five slide rails 10, and a slider 16 is arranged on the corresponding XYZ three-axis slide rail 10. The object component 2 includes LED lights 27, various grasping objects 18 and built-in spacer touch sensors 31, and the grasping object component 2 is fixed on the X-axis slider 16 of the X-axis slide rail 10-1 in the three-dimensional electric slide table 1 by bolts On -1, the button switch 3 is fixed on the support...
Embodiment 2
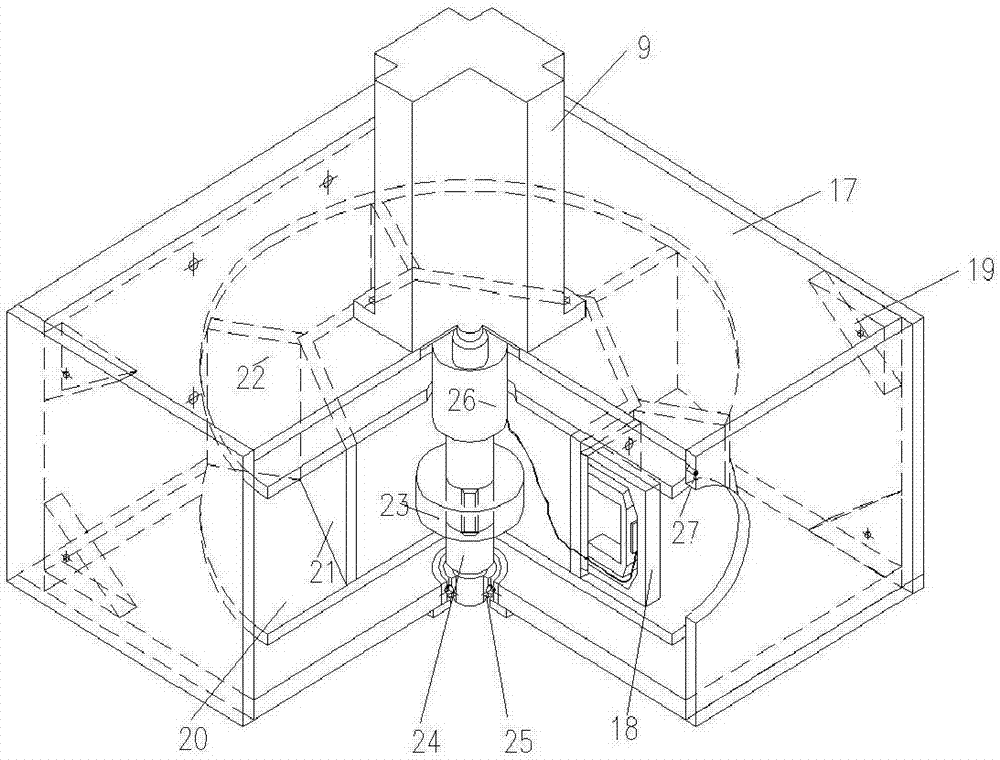
[0058] see Figure 10 , the operation and experimental process of the present invention, the specific steps are as follows: the subject sits at a position 20-30 cm in front of the exercise platform in a comfortable posture, and sticks reflective markers on the exercise arm. The experimenter sets the experimental parameters on the parameter setting unit of the PC 7, starts to record the EEG signals on the EEG signal recording system 5, and starts to record the motion signals on the motion recording unit of the PC 7. At this time, the data of the PC The writing unit sends the digital label corresponding to "start recording" to the EEG signal recording system 6, and records synchronously with the current EEG signal. During a complete experiment, the logic control unit of the PC 7 controls the three-dimensional electric slide table 1 to move the turntable 17 to a designated coordinate point, and controls the rotation of the motor 14 on the turntable 17, so that the designated gras...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More