

Three-dimensional force flexible tactile sensor based on conductive fabric
A tactile sensor and conductive fabric technology, applied in the field of sensors, can solve the problems of low sensitivity, separation of pressure-sensitive materials and electrodes, lack of flexibility, etc., to achieve the effect of improving sensitivity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
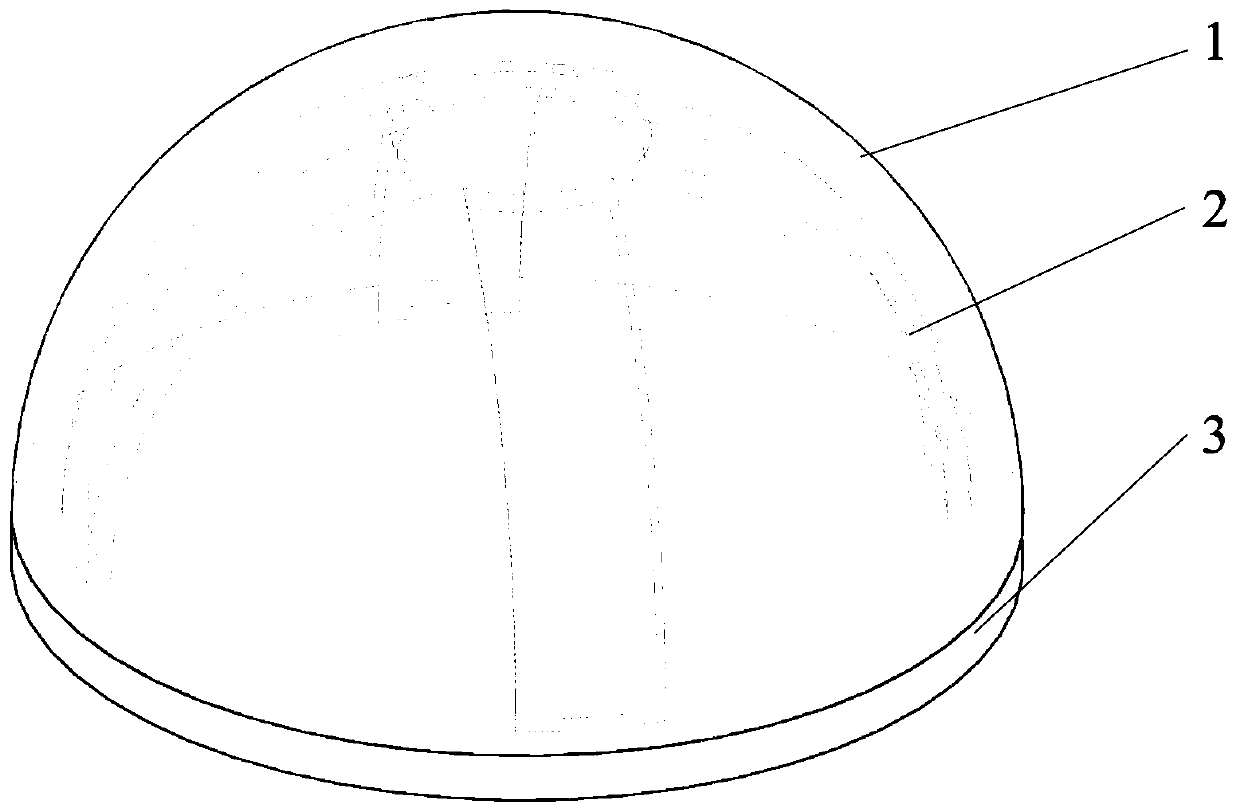
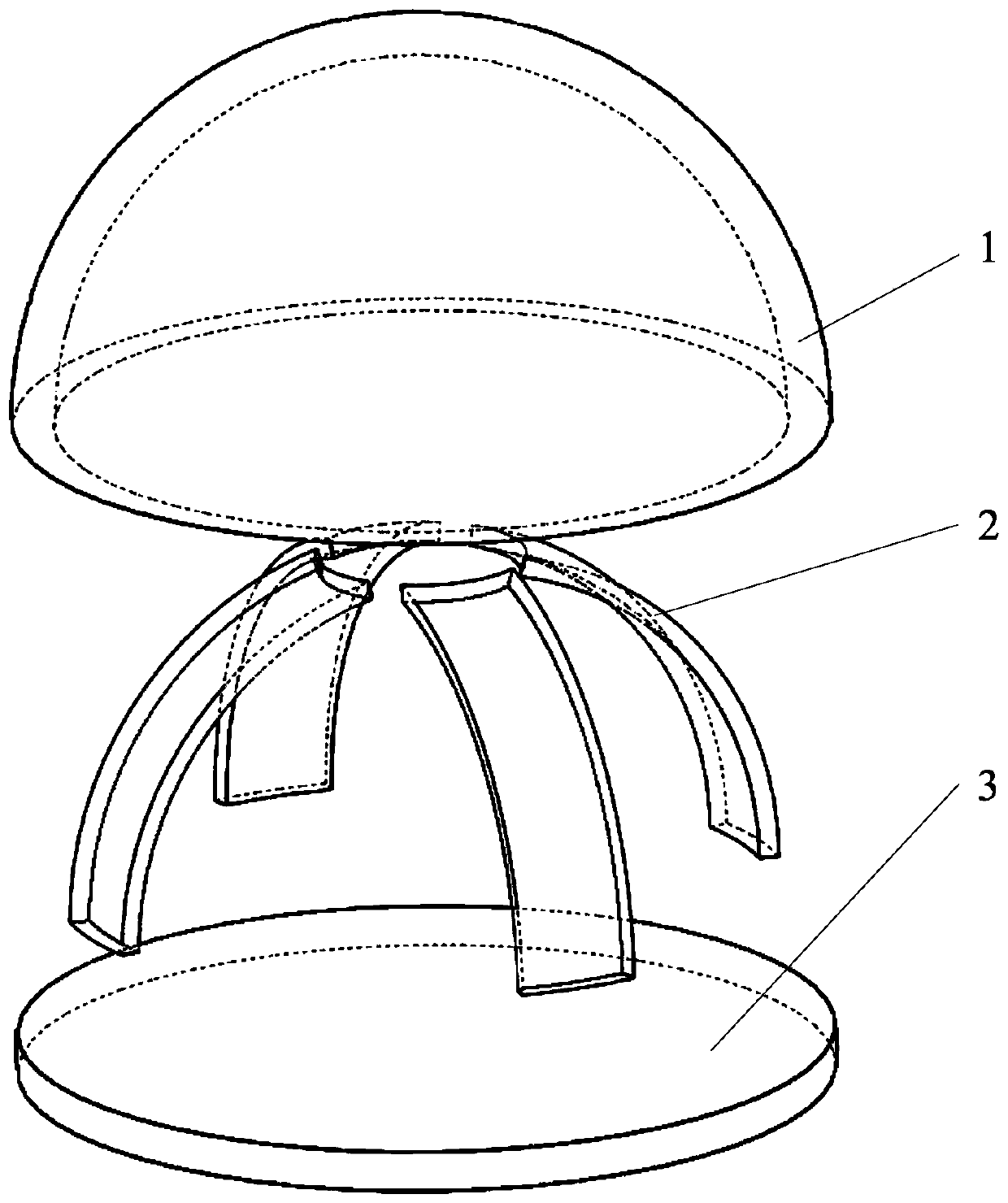
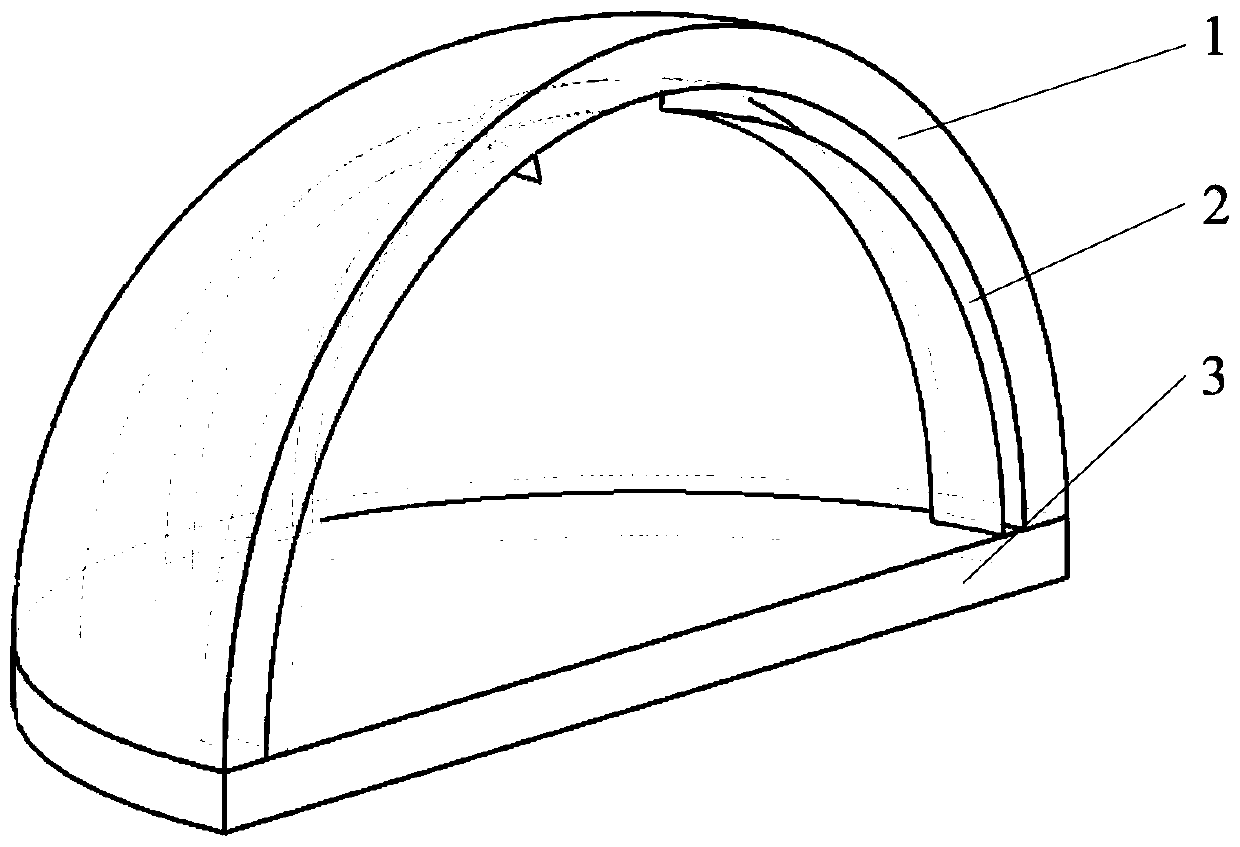
[0031] Such as figure 1 and figure 2 Shown, the structure of the three-dimensional force flexible tactile sensor based on conductive fabric of the present invention is: comprise a bottomless hemispherical flexible cavity 1 and 4N identical rectangular flexible tactile sensing units 2, in the embodiment and accompanying drawing with N=1 is an example; each flexible touch sensitive unit 2 is fixed on the inner wall of the hemispherical flexible cavity 1 at equal intervals after being pre-stretched with the same stretch rate along the length direction, and the hemispherical flexible cavity The central axis of 1 is the symmetry line and is symmetrical in pairs, and the flexible touch sensitive units 2 are not in contact with each other; a cylindrical flexible substrate 3 is fixed at the bottom of the hemispherical flexible cavity 1 as a supporting base, and the diameter of the cylindrical flexible substrate 3 is The outer diameter is the same as that of the hemispherical flexibl...
PUM
| Property | Measurement | Unit |
|---|---|---|
| radius | aaaaa | aaaaa |
| thickness | aaaaa | aaaaa |
| diameter | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More