

A Calculation Method of Space Robot End Contact Collision Force
A space robot and calculation method technology, applied in the direction of instruments, design optimization/simulation, geometric CAD, etc., can solve the problems of mechanical arm or target damage, complex dynamic behavior, and large test complexity, so as to achieve simple calculation and improve efficiency , the effect of good tightness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] Below in conjunction with accompanying drawing, the present invention is described in further detail:
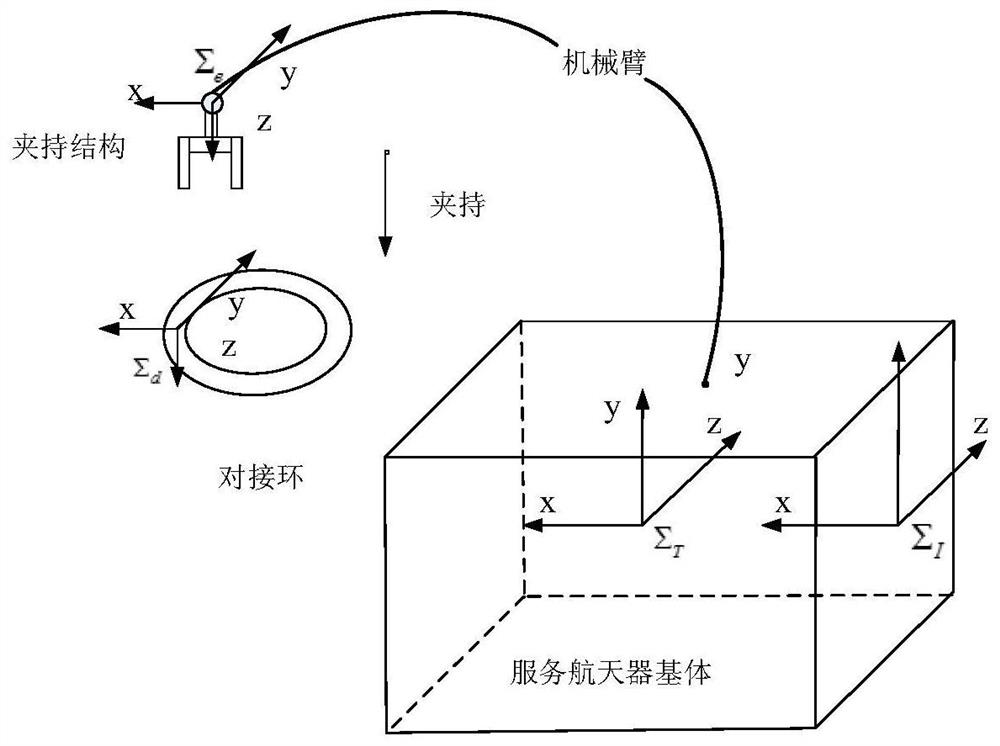
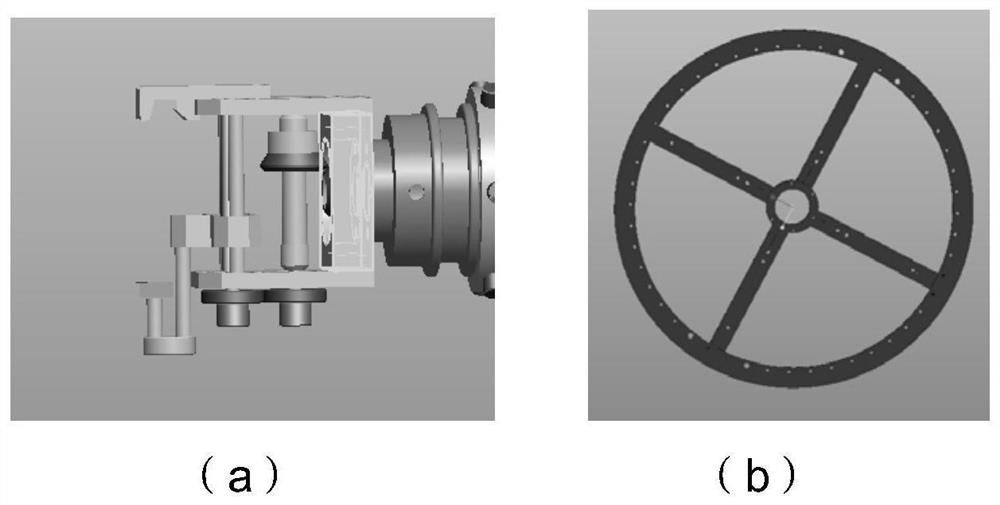
[0041] The clamping tool is connected to the base body of the service spacecraft through a six-degree-of-freedom space manipulator, and the positioning and attitude determination are realized through the in-orbit movement of the space manipulator to ensure that it can contact the docking ring of the target star and clamp the docking ring , the relative pose of the clamping tool and the docking ring when clamping and capturing is as follows figure 1 as shown, figure 2 (a) and figure 2 (b) shows the CAD model of the holding tool and docking ring. In this embodiment, the capturing device is selected as a clamping tool, and the captured device is selected as a docking ring. For the process of clamping the docking ring, set the material properties, geometric parameters and control parameters for simulation. The centroid of each rigid body is at its geometric center, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More