

Product morphology detecting method based on Kinect
A shape detection and product technology, applied in the field of iterative three-dimensional reconstruction, can solve the problems of long measurement distance and low precision, and achieve the effect of reducing the false detection rate, easy layout and fast speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
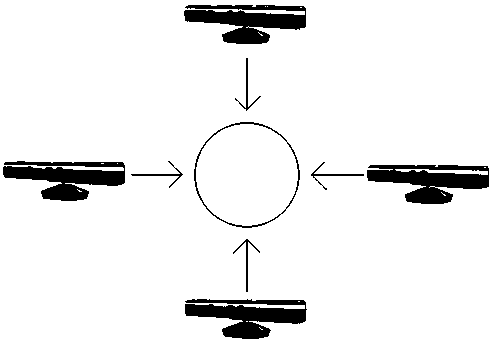
[0027] The present invention is realized in this way, the Kinect-based assembly line product shape detection method is characterized in that it is composed of three key parts: Kinect-based 4-camera calibration, depth data optimization and three-dimensional reconstruction.
[0028] One based on kinect camera calibration
[0029] Camera calibration has a direct relationship to the accuracy of measurement results. The more precise the calibration, the more accurate the final measurement will generally be. Since each lens has a different degree of distortion when it leaves the factory, a corrected image can be obtained through calibration. Another important reason is for 3D scene reconstruction. The present invention mainly calibrates four Kinect depth cameras.
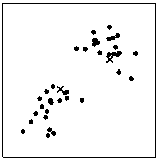
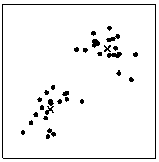
[0030] For a single Kinect camera, Zhang Zhengyou’s checkerboard calibration method can be used directly, but this paper uses multiple Kinects. Due to the restriction of checkerboard placement, it is difficult for each ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More