

Calibration system and method of industrial robot workpiece coordinate system
An industrial robot, calibration and calibration technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of unfavorable popularization and application, high application cost of 3D vision system, etc., and achieve the effect of popularization and application, high calibration accuracy and low application cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] In order to make it easy to understand the technical means, creative features, achieved goals and effects of the present invention, the present invention is further described below.
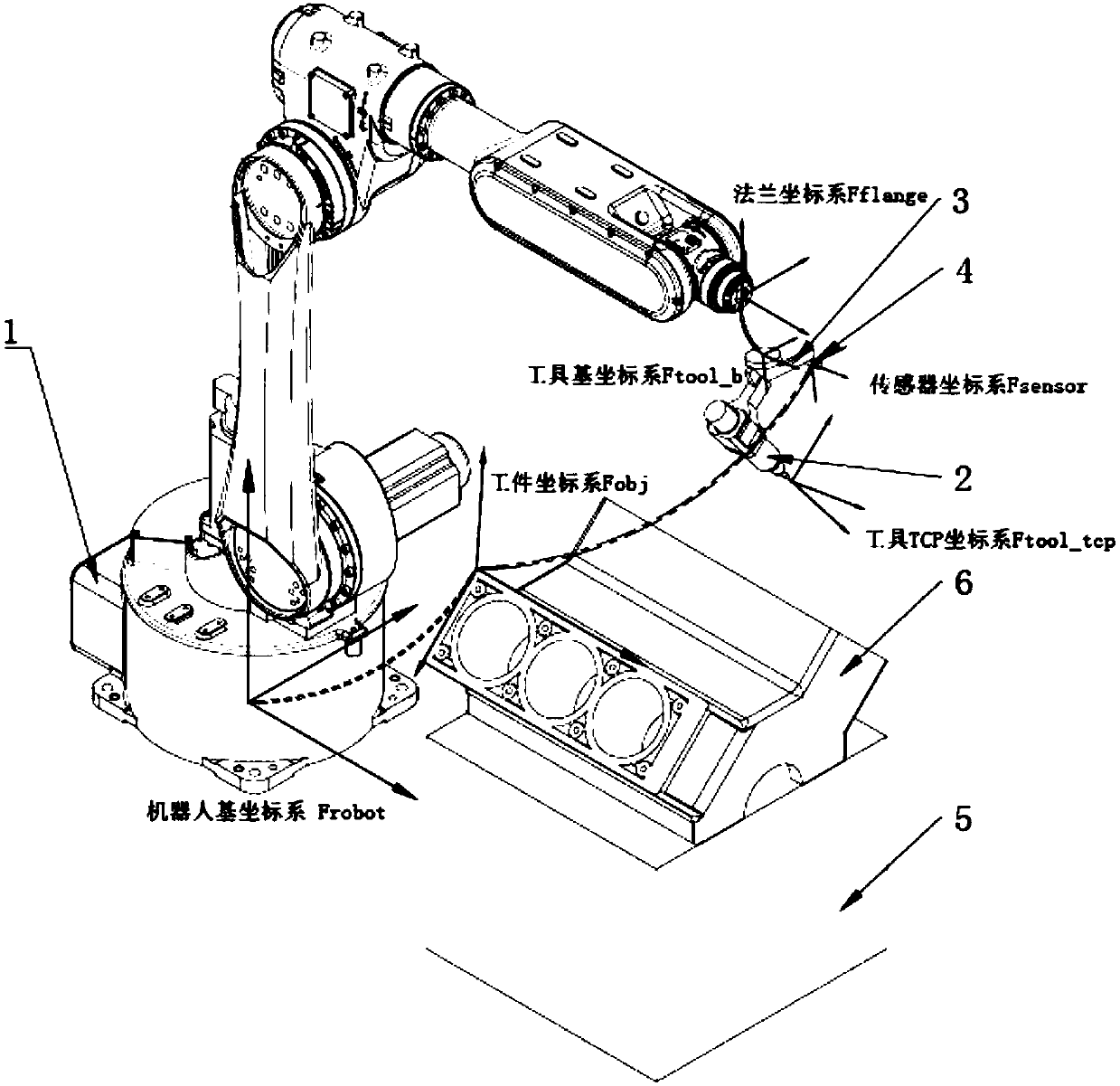
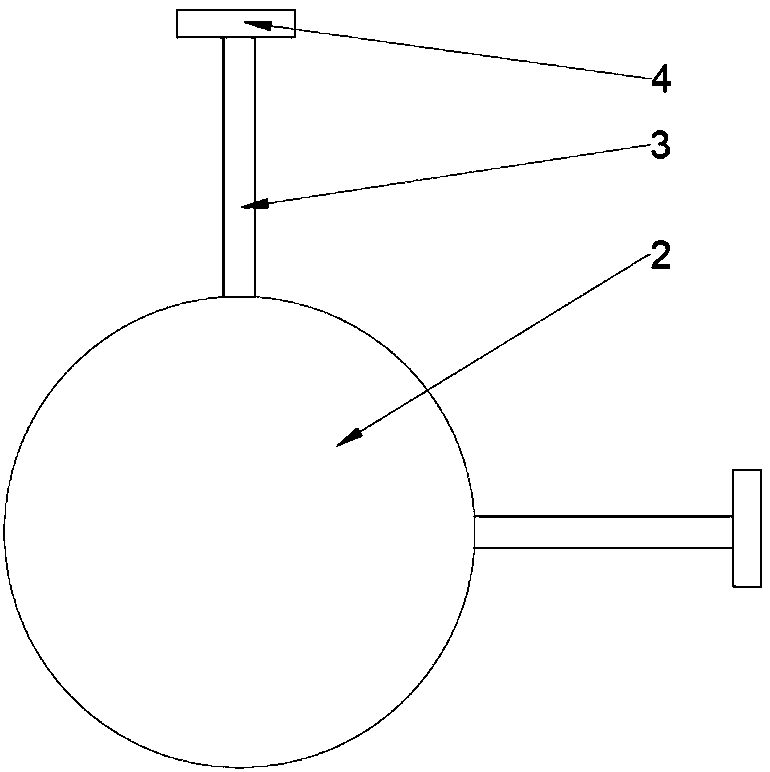
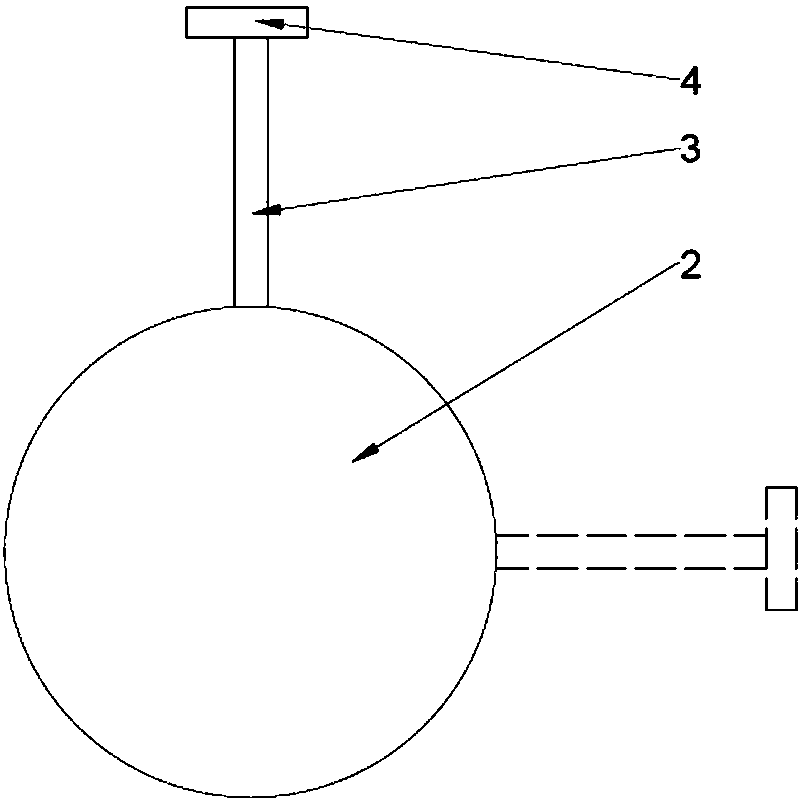
[0036] like Figure 1 to Figure 7 As shown in the figure, a calibration and calibration system of the workpiece coordinate system of an industrial robot includes an industrial robot 1, a robot controller, a robot end tool 2, a sensor installation intermediate structure 3, a calibration sensor assembly 4, a workpiece installation platform 5, a workpiece installation Workpiece 6 on table 5.
[0037] The robot end tool 2 is installed on the wrist end of the industrial robot 1 through a flange, the calibration sensor assembly 4 is installed on the robot end tool 2 or the wrist end flange through the sensor installation intermediate structure 3, and the workpiece 6 is located on the industrial robot 1. within the operating space.
[0038] In the present invention, the flange coordinate system...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More