

Target positioning method and system under large-tilt remote observation environment
A target positioning and environmental technology, applied in the field of surveying and mapping science, can solve the problems of limited target positioning accuracy, large initial value error of target points, and ineffective observation of laser ranging
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0087] The specific technical solutions of the present invention will be described below according to the drawings and embodiments.
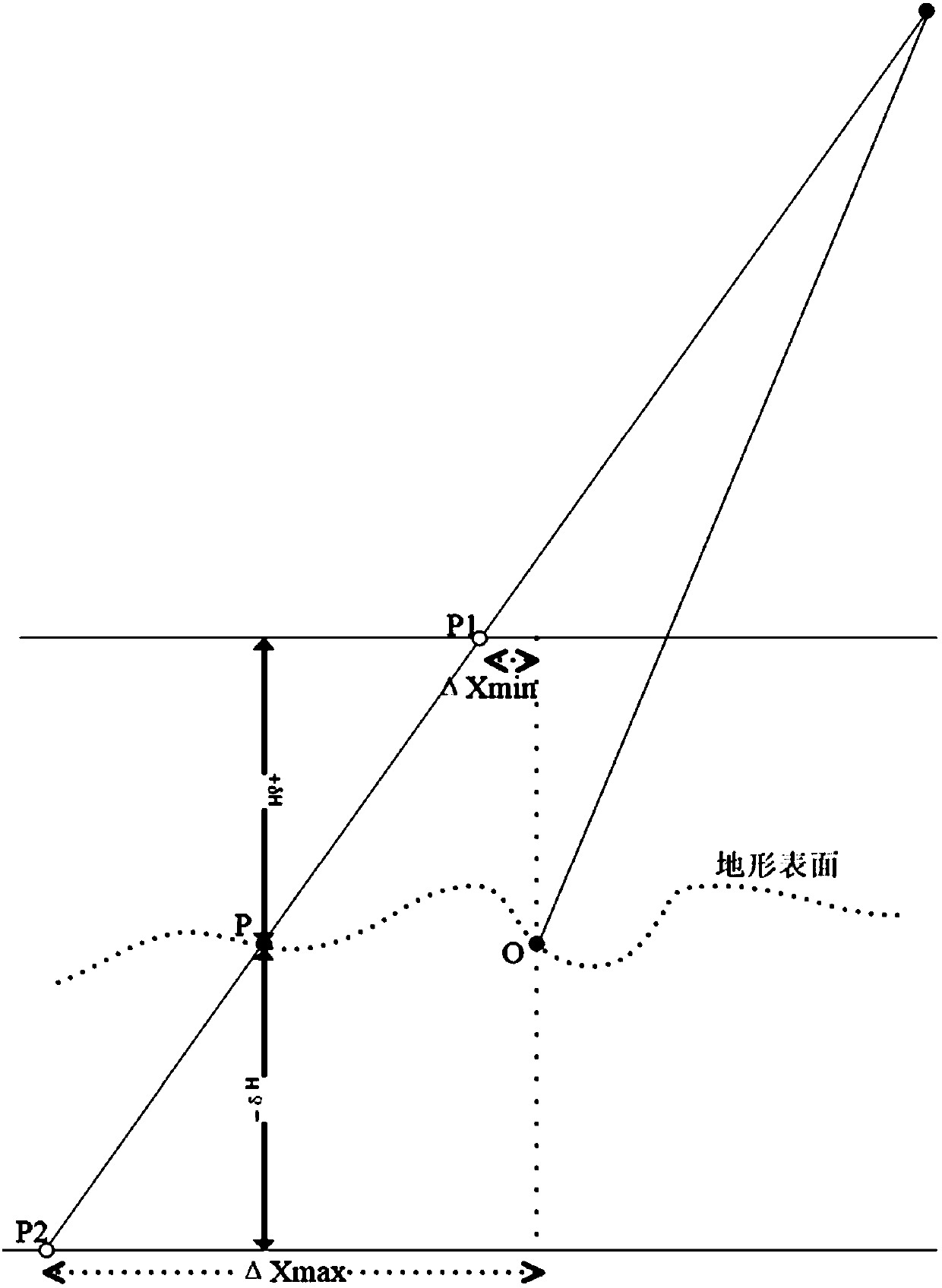
[0088] The invention provides a target positioning method in a large-tilt remote observation environment. This method is suitable for flying platforms that provide video images and laser ranging devices, where video images are used to display targets, and laser devices are used to measure the distance from targets to flying platforms. Acquisition of image exterior orientation elements and target positioning under certain conditions. The study found that when the target is observed at a large tilt and long distance, it is difficult to achieve high-precision positioning of the target by using only video images according to the traditional GPS-assisted beam adjustment method. The reason is that there is no ground control information and no high-precision attitude determination equipment. Under certain conditions, the accuracy of GPS-assisted beam ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More