

A relative motion equivalent method and system of a nine-degree-of-freedom motion simulator
A technology of motion simulator and relative motion, which is applied in the field of efficiency, can solve the problems of inability to carry out full-condition simulation tests and tests, limited motion, and small range of relative motion in the horizontal and vertical directions, so as to save development and test costs, Reduce the requirements of the test site and improve the stability of the algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0073] The specific implementation steps are as follows:
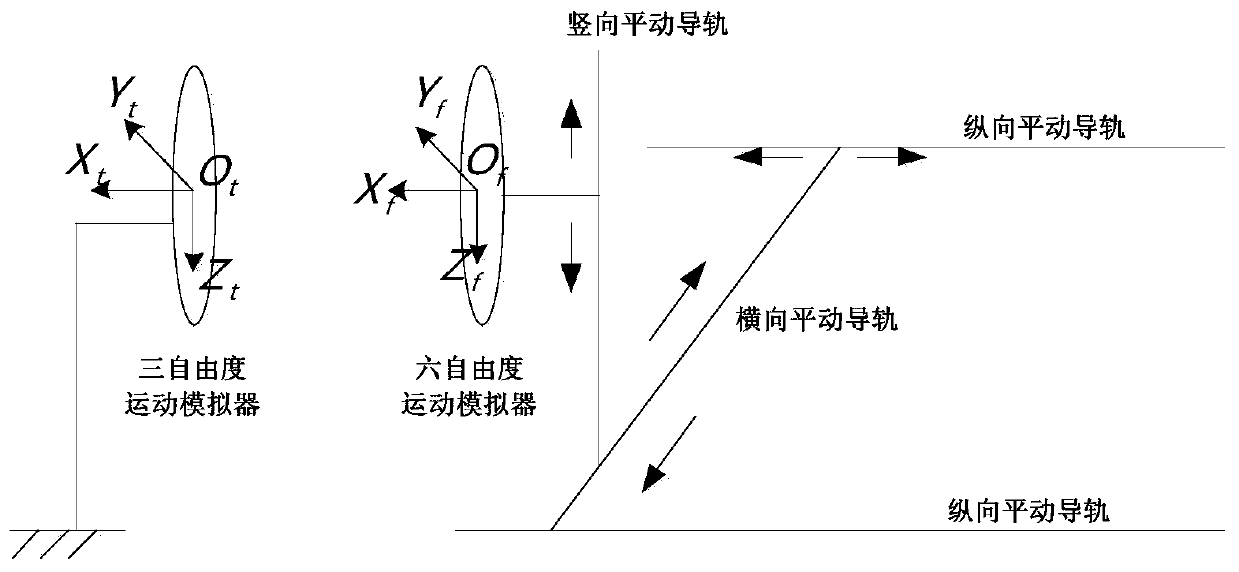
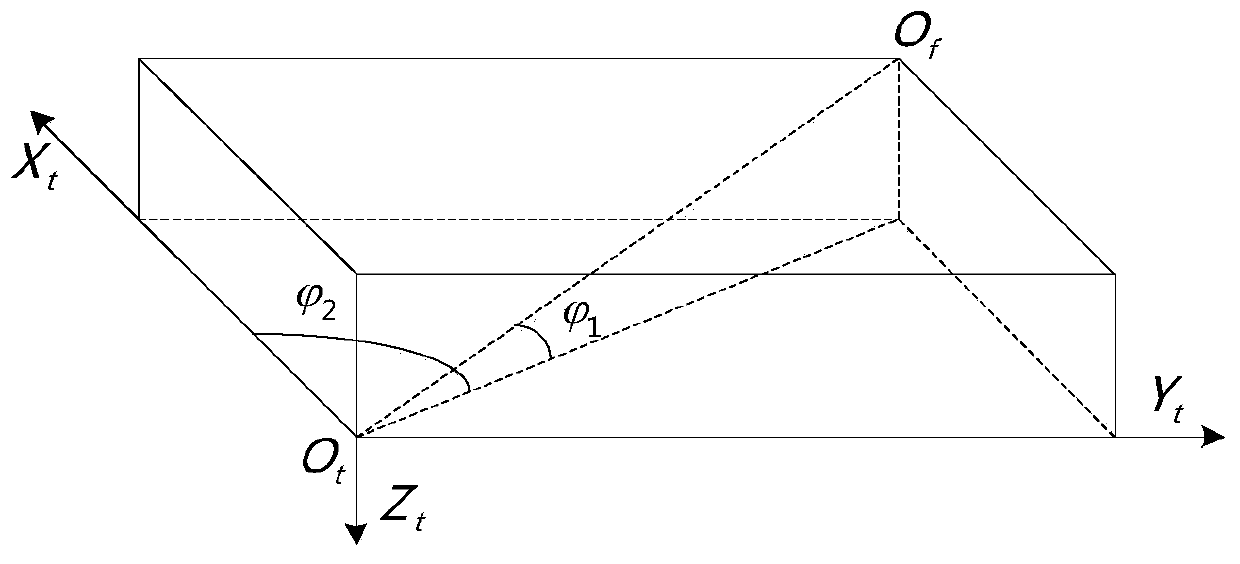
[0074] 1) Know the expected relative pose relationship between the two motion simulators (θ 1 , θ 2 , θ 3 ) and relative positional relationship (X, Y, Z). (θ 1 , θ 2 , θ 3 ) is the coordinate system of the six-degree-of-freedom motion simulator relative to the 3DOF motion simulator coordinate system The Euler angles of the three coordinate axes, (X, Y, Z) is the coordinate system of the six-degree-of-freedom motion simulator Origin O f In the three-degree-of-freedom motion simulator coordinate system coordinates below.
[0075] 2) When the equivalent algorithm is not considered, calculate the transformation relationship between the two coordinate systems according to the expected relative pose and relative position data.
[0076] Usually, the relative attitude relationship is completed through the attitude motion of the three-degree-of-freedom motion simulator and the six-degree-of-freedom motion simula...
example 1
[0104] In the algorithm of Example 1, the simulation of lateral and vertical relative motion is realized through the pitching motion and yaw motion of the three-degree-of-freedom motion simulator, while the roll angle of the three-degree-of-freedom motion simulator remains unchanged. If necessary, the roll angle of the three-degree-of-freedom motion simulator can also participate in the motion equivalent simulation, so as to achieve more complex motion equivalent.
Embodiment 3
[0106] The algorithm of Example 1 is based on the "three + six" configuration of the nine-degree-of-freedom relative motion simulator for research and verification, but the core idea of this algorithm can be easily extended to other configurations of the nine-degree-of-freedom motion simulator , such as the "five + four" configuration.
[0107] Through experimental verification and simulation, the present invention well solves the problem that the hardware itself of the rendezvous and docking nine-degree-of-freedom motion simulator has a small range of lateral and vertical relative motion, limited motion, and cannot carry out simulation tests and tests of all working conditions; the present invention The method of the invention has good stability, not only can be used for static simulation test, but also can be used for continuous dynamic simulation test, and the simulation process is stable; due to the use of the equivalent algorithm proposed by the present invention, it is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More