

MEMS-IMU-based heading feedback and correction method for indoor pedestrian navigation
A pedestrian navigation and heading technology, applied in the field of pedestrian navigation, to achieve the effect of strong practicability, easy operation of algorithm flow, and improvement of navigation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The invention will be described in further detail below in conjunction with the accompanying drawings.
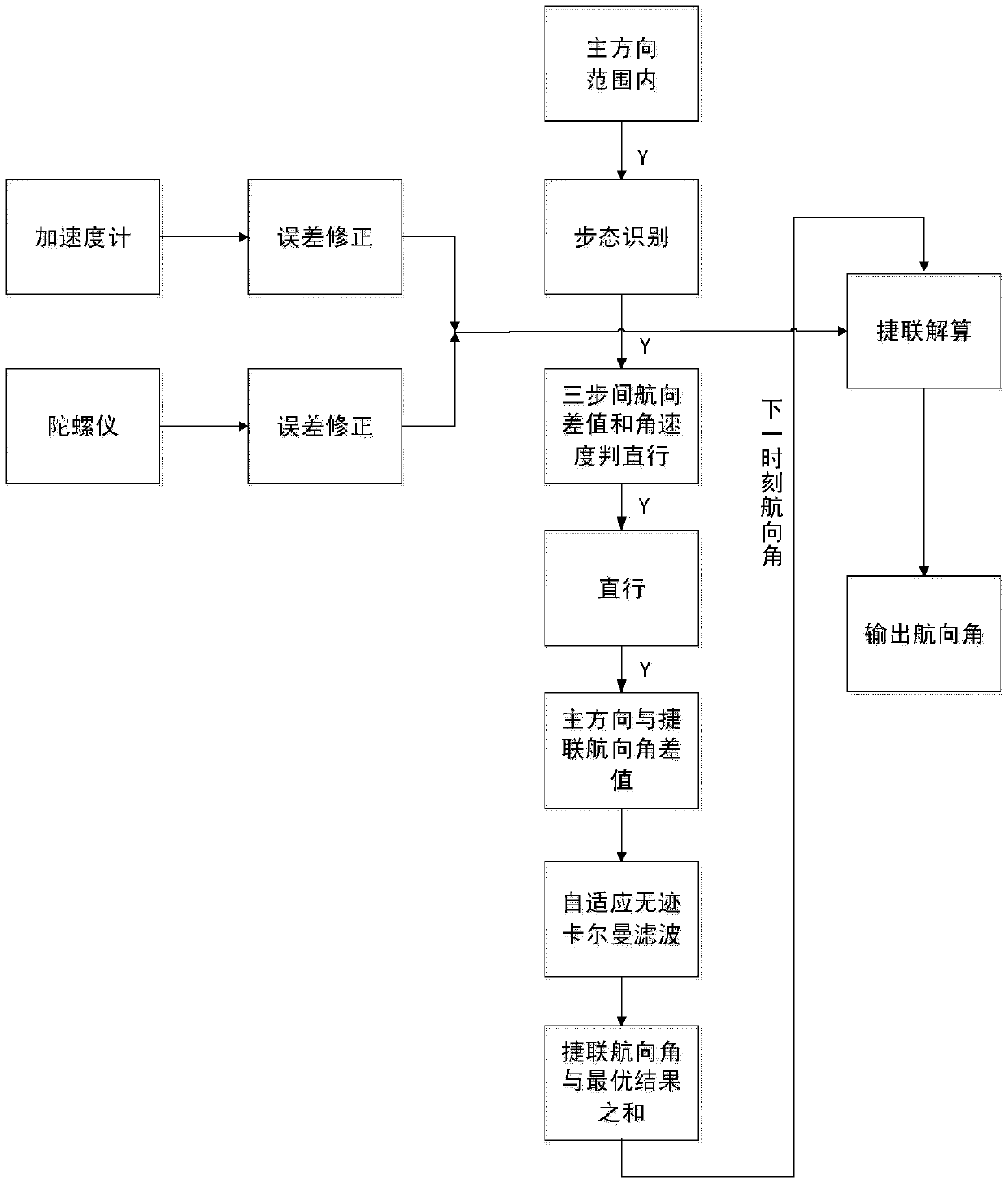
[0023] Such as figure 1 As shown, during the navigation calculation process, the gyroscope can obtain the angular rate information in real time, and the strapdown heading angle can be obtained in real time through the quaternion calculation, and the calculation frequency can generally be set to 50Hz. When the pedestrian is going straight within the range of the main direction, the difference between the current strapdown heading angle and the current main direction heading angle is subjected to adaptive unscented Kalman filtering, and the sum of the optimal result and the current strapdown heading angle is taken as The output of the current heading angle, and use it as the initial value of the heading at the next moment to participate in the quaternion and Euler angle calculation.
[0024] The heading feedback correction algorithm for indoor pedestrian navigation ba...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More